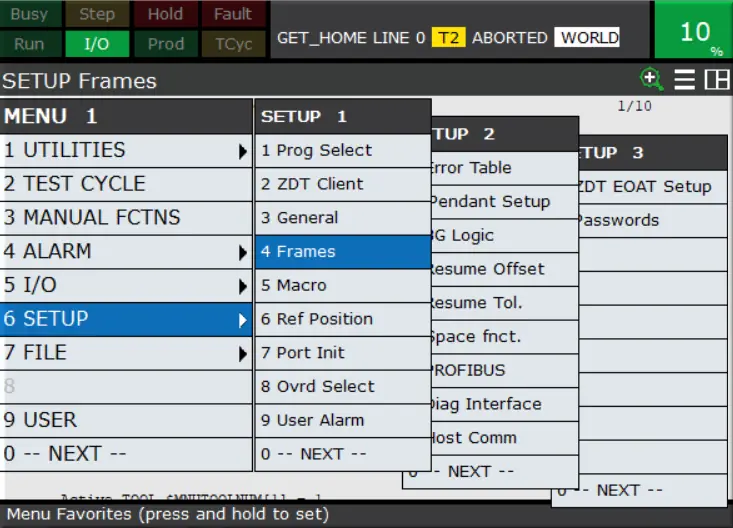
Figure 30 : Setup Frames MENU 1
- Cliquez sur MENU 1 > 6 SETUP > SETUP 1 > 4 Frames.
La création de l'outil Tool Frame est indispensable pour définir la dimension de l’objet à l’extrémité de l’axe J6 ainsi que le centre de l'outil (TCP), qui est le point d’équilibre.
Le menu de sélection de l’objet à modifier.
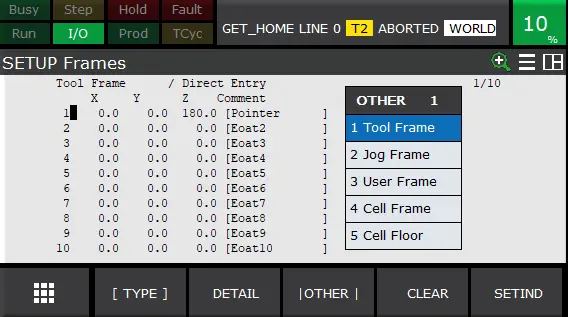
Figure 31 : Setup Tool Frame
Le Tool est le système de coordonnées propre à l'outil.
Repère X Y Z
- Cliquez sur OTHER 1 > 1 Tool Frame.
La liste des outils disponible.
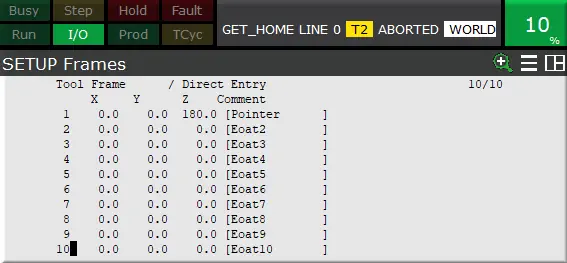
Figure 32 : Tool Frame
On peut retrouver les différents outils. Il se présente sous la forme de X Y Z Comment
Lors d’un essai j’ai créé l’outil N°1 je l’ai appelé “Pointer”. Je l’ai configuré pour avoir un Z a 180 de l’axe J6 du robot :
1 X : 0.0 Y : 0.0 Z : 180.0 [Pointer]
Dans notre tuto on va utiliser le Eoat2 qui est vide :
2 X : 0.0 Y : 0.0 Z : 0.0 [Eoat2]
Deuxième outil de préhension. Le robot peut être configuré pour utiliser plusieurs outils différents selon les tâches.
Menu de configuration de l’outil
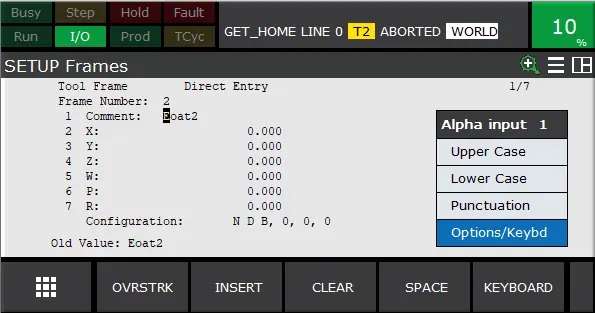
Figure 33 : Config outil 2
La méthode par défaut est " Direct Entry " cela permet de remplir en direct les coordonnées. Par exemple si le bureau d’étude donne la distance déjà existante.
L’outil est créé sur la Frame Numéro 2.
Afin de changer le nom :
- Cliquez sur " Comment: Eoat2 "
- Cliquez sur Alpha input 1 > Options/Keybd (Cela affiche un clavier virtuel).
La configuration n’est pas encore déterminée : N D B, 0, 0, 0
Menu de sélection des méthodes afin de calibrer l’outil automatiquement.
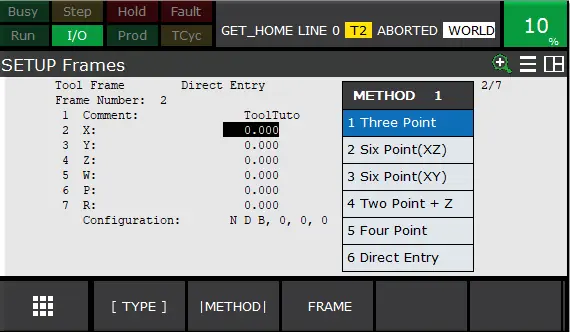
Figure 34 : Menu Tool Three Point
La première méthode est la méthode en 3 points c’est la méthode que nous allons utiliser dans le tuto. Elle est souvent utilisée pour les outils dit " Simple " cela correspond si le préhenseur est dans la même direction que la base de l’axe J6.
La deuxième méthode est la méthode en 6 points en X et en Z cela permet de rajouter les angles mais aussi un sens d’enregistrement. Elle est utilisée pour les outils dit " Complexe " cela correspond si le préhenseur est dans une direction différente de la base de l’axe J6. Par exemple un préhenseur à 45° en forme de V.
La troisième méthode est la même méthode que pour XZ mais pour un enregistrement avec les directions X et Y.
La quatrième méthode est la méthode des 3 points mais avec un point en plus en Z.
La cinquième méthode est la méthode en quatre point elle permet de faire comme pour la méthode en 3 points mais on rajoute un point en plus pour plus de précision.
La cinquième méthode est la méthode en direct Entry cela correspond à une méthode permettant de rentrer en direct les valeurs de l’outils.
La méthode des trois points (Three Point method) est une technique utilisée pour définir la position et l'orientation d'un Tool Frame dans l'espace en déplaçant le TCP en X, Y et Z, les paramètres d'orientation W, P, R restant à zéro :
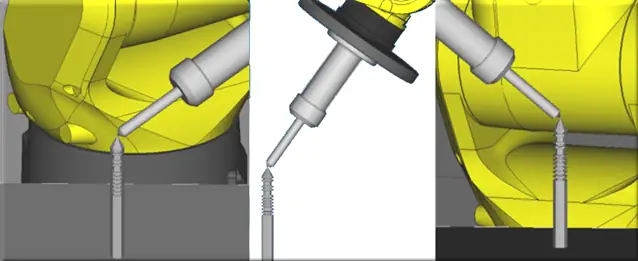
Figure 35 : Calibration en 3 points
- Identifiez trois points non colinéaires (c'est-à-dire qu'ils ne peuvent pas être alignés sur une même ligne) sur le Tool Frame ou sur l'objet à définir ;
- Pour chaque point, déterminez ses coordonnées X, Y, et Z dans le système de coordonnées du robot. Ces coordonnées sont généralement mesurées ou déterminées grâce à un logiciel de 3D ;
- Le robot utilise les coordonnées de ces trois points pour calculer la position et l'orientation du Tool Frame. En d'autres termes, il détermine la transformation (translation et rotation) qui permet de passer du système de coordonnées du robot au système de coordonnées du Tool Frame.
Apprentissage des points :
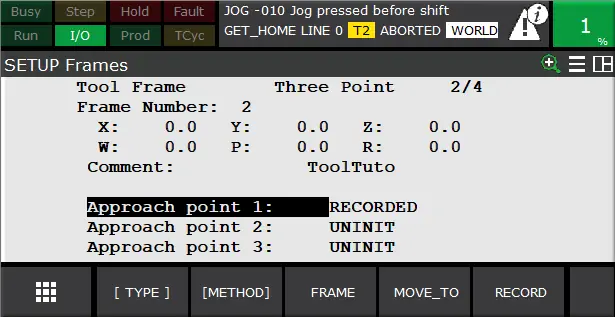
Figure 36 : Approach point 1
Apprentissage des points un a un avec des orientations différentes. Il suffit de faire shift + F5(RECORD) pour les apprendre.
L'outil est sur le point d'être entièrement configuré.
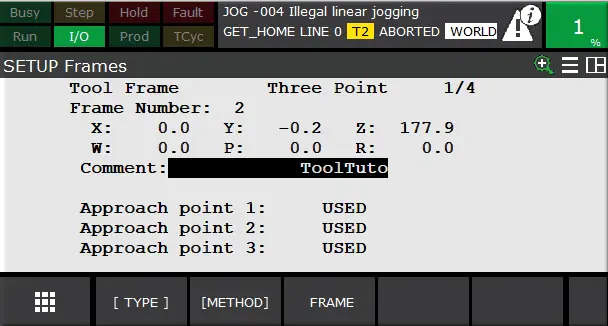
Figure 37 : Configuration terminer
L’outils est terminé. On peut voir que le Y est paramétré en -0.2mm et en Z en 177.9mm
Sur la Frame numéro : 2
La méthode des trois points a été testée avec J4 à J6. Cela permet de voir si l’outil est correct.