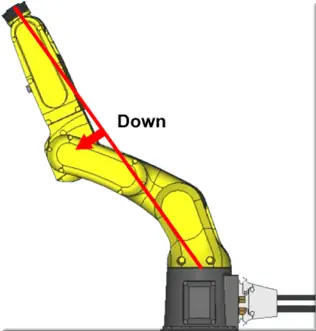
Figure 23 : Elbow Pitch Down
Cette configuration, désignée par "Down" dans le code FUT, positionne l’avant-bras vers le bas par rapport au corps du robot. Elle offre une meilleure extension pour des travaux en hauteur. La flèche ⇙ indique la direction du mouvement de l'articulation.
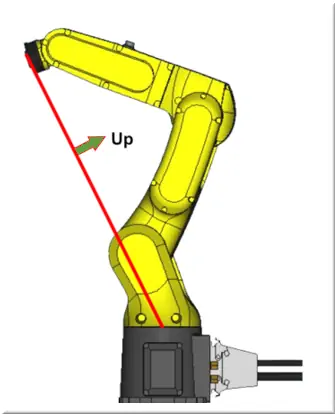
Figure 24 : Elbow Pitch Up
La configuration "Up" dans le code FUT positionne l’avant-bras vers le haut, élargissant la plage de mouvement accessible. Cette position est privilégiée pour les opérations nécessitant une portée verticale importante, ou pour éviter l'encombrement d'obstacles sur le plan horizontal. La flèche ⇗ indique la direction du mouvement de l'articulation.