Architecture réseau :
La liaison entre le robot et l’automate est réalisée en Profinet, avec l’utilisation d’un automate Siemens 1512SP1 PN. Cette configuration permet un échange fiable et rapide des signaux entre le robot et le PLC, notamment pour les UOP, les échanges de positions ou les signaux de synchronisation.
Attention : une carte Profinet supplémentaire est obligatoire pour pouvoir utiliser la communication Profinet entre le robot et l’automate. Sans cette carte optionnelle installée dans le robot, la communication Profinet ne peut pas être activée ni configurée.
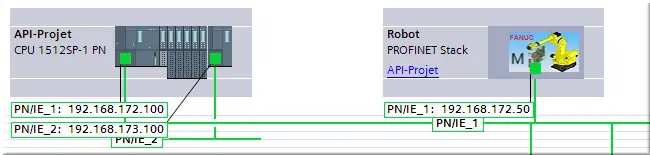
Figure 74 : Architecture réseau PROFINET
Afin d’utiliser le GSDML identique à celui de la machine de salon, nous avons dû en faire la demande directement auprès du support FANUC. Ce fichier n’étant pas fourni par défaut, il est nécessaire de le récupérer auprès d’eux pour garantir une compatibilité totale entre le robot et l’automate Siemens via Profinet.
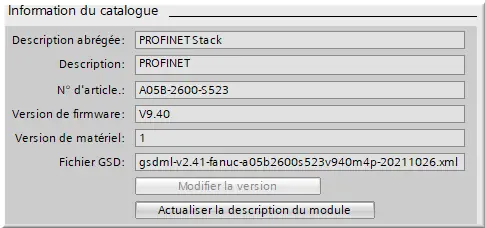
Figure 75 : GSDML PROFINET Stack
Variables échangées entre l’automate et le robot
DI & GI : sorties de l’automate et entrées du robot
DO & GO : entrées de l’automate et sorties du robot
UOP : paramètres de configuration permettant la gestion du cycle robot (Start, Hold, Fault Reset.)
Variable d’entrée automate UOP :
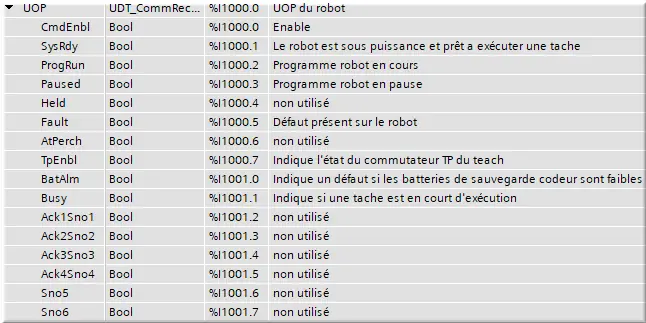
Figure 76 : UOP CmdEnbl in
Variable d’entrée automate Tout ou rien robot DO :

Figure 77 : TOR1 DO1_EXE_CODE_TRAJ_EC in
Variable d’entrée automate booléen robot DO :
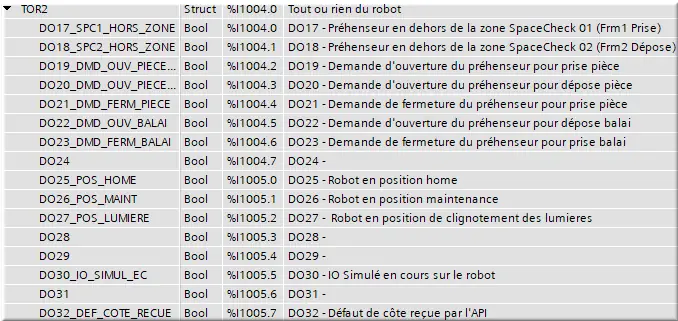
Figure 78 : TOR2 DO17_SPC1_HORS_ZONE in
Variable d’entrée automate integer robot Go :
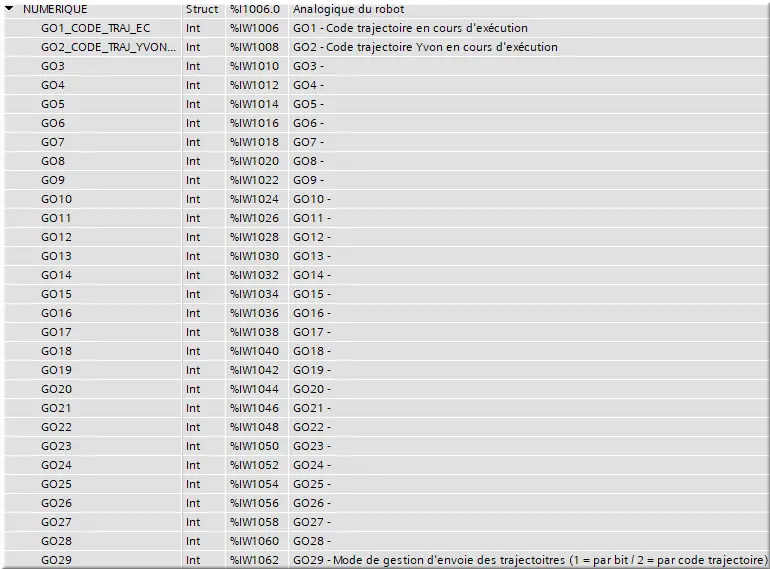
Figure 79 : NUM GO1_CODE_TRAJ_EC in
Variable sortie automate UOP :
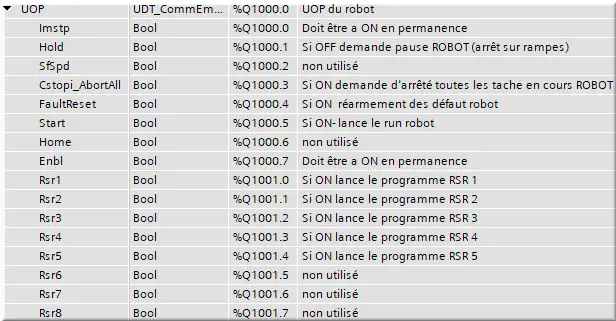
Figure 80 : UOP Imstp out
Variable sortie automate Tout ou rien robot DI :

Figure 81 : TOR1 DI1_DMD_EXE_CODE_TR out
Variable sortie automate Tout ou rien robot DI :
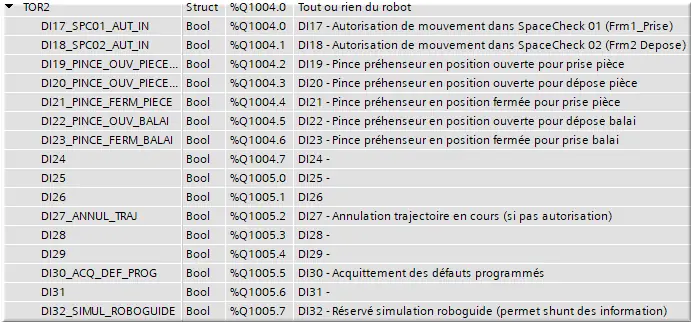
Figure 82 : TOR2 DI17_SPC01_AUT_IN out
Variable sortie automate integer robot GI :
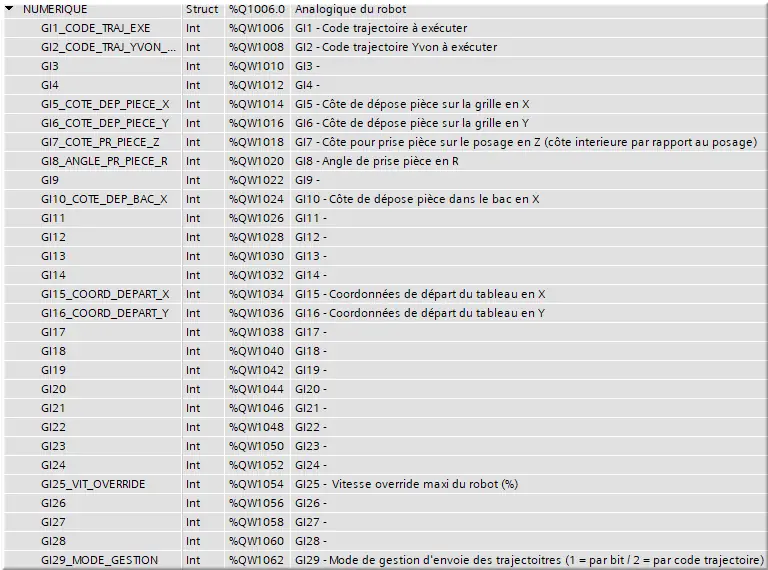
Figure 83 : NUM GI1_CODE_TRAJ_EXE out