Un User Frame est un repère cartésien défini par l’utilisateur afin d’aligner le robot sur un élément physique de la cellule (table, convoyeur, gabarit, prise.). Il permet d’enseigner et d’exécuter des points directement dans ce repère local, ce qui simplifie la programmation et améliore la précision.
Un User Frame est défini par six valeurs : X, Y, Z, W, P, R, représentant respectivement l’origine et l’orientation du repère. Une fois sélectionné, tous les mouvements cartésiens du robot sont calculés par rapport à ce repère.
L’User Frame de la prise est défini avec :
- X orienté dans le prolongement du robot ;
- Z orienté vers le haut ;
- Une orientation sans angle (W, P, R à 0° dans notre standard).
Ce repère sert de point 0 pour tous les calculs de trajectoire. Chaque User Frame est positionné sur un repère physique réel afin d’assurer la correspondance entre le modèle 3D et le montage réel, car des écarts peuvent exister entre la conception et l’installation.
La frame est renseignée à partir de mesures issues du modèle 3D :
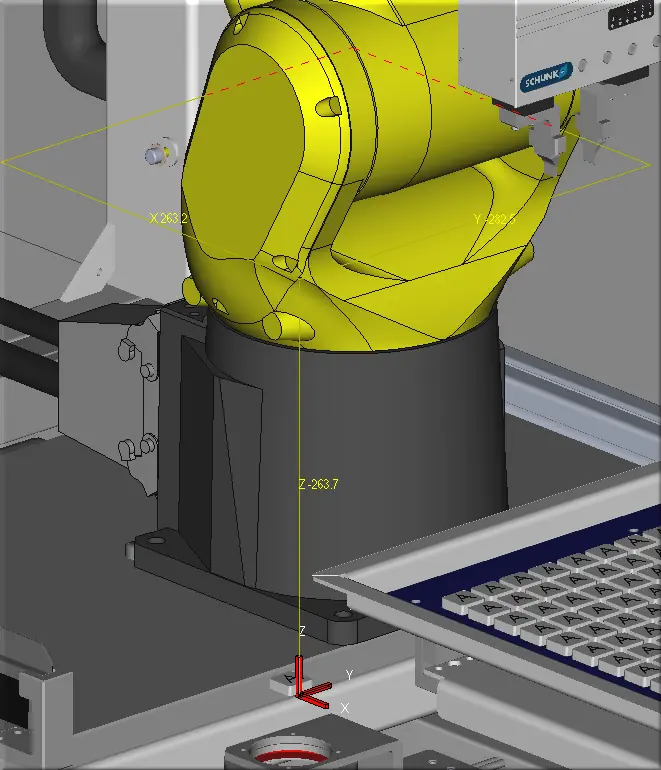
Figure 58 : User Frame prise Z -263
- Les coordonnées X et Y sont mesurées depuis l’axe 1 du robot.
- La coordonnée Z est déterminée à partir de l’axe 2.
L’User Frame de la dépose possède la même orientation que celui de la prise :
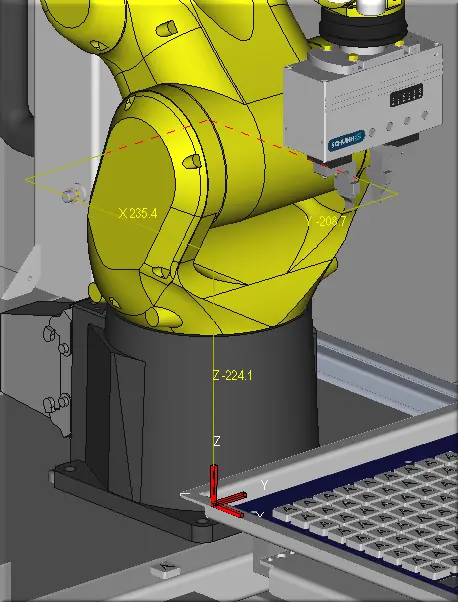
Figure 59 : Frame dépose plateau Z -224
L’User Frame de la dépose a une coordonnée Z -224.1 supérieure à celle du point zéro en Z -263.7
Il sert de repère local pour positionner correctement les pièces sur le plateau lors de la dépose. En conservant la même direction (X dans l’axe du robot, Z vers le haut, orientation sans angle), on garantit une cohérence entre les trajectoires de prise et de dépose, ce qui simplifie la programmation et réduit les risques d’erreur.
Dans la vue 3D Robot Pince Plateau Bol Bac bleu :
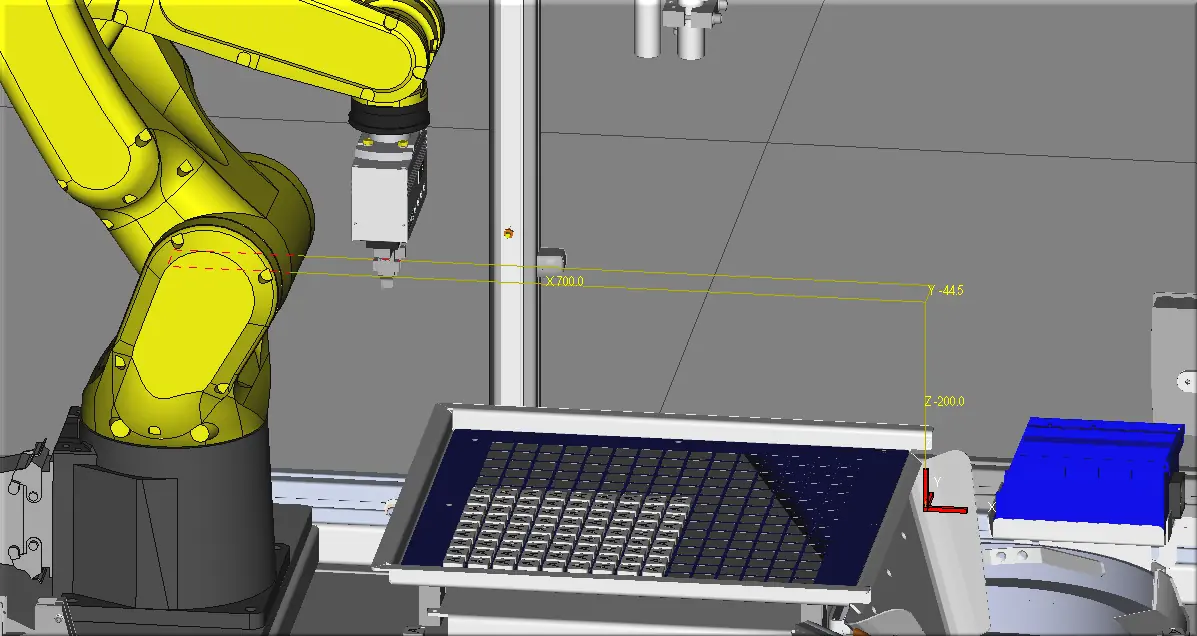
Figure 60 : Frame dépose bol
Distance en fin de plateau pour atteindre le bol.
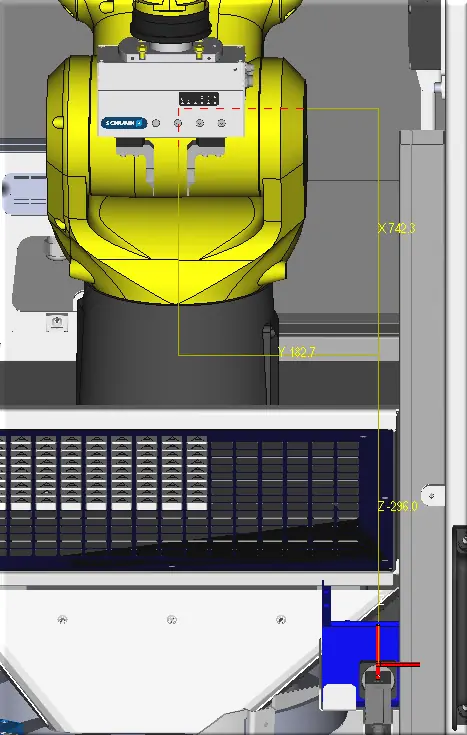
Figure 61 : Frame dépose bac
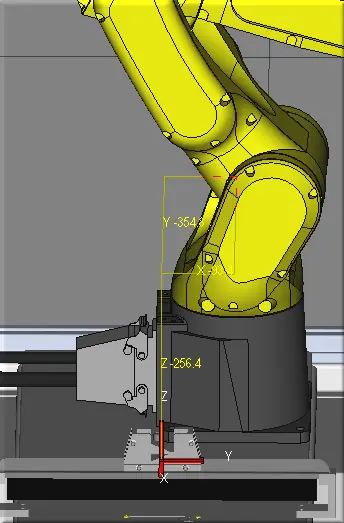
Figure 62 : Frame prise dépose balai
Figure 63 : Frame dépose bac bleu
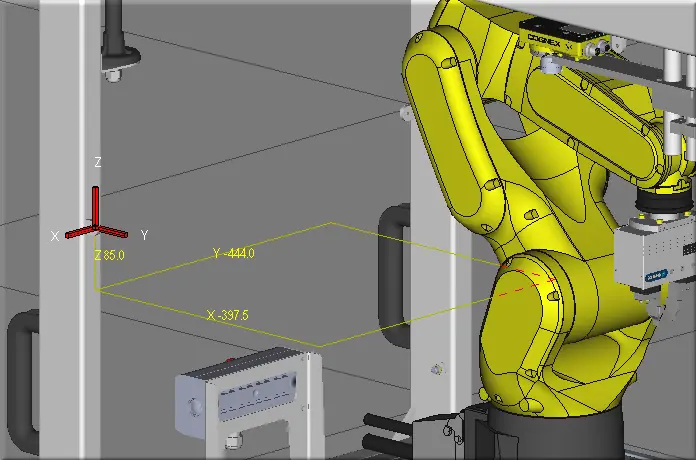
Figure 64 : Frame trajectoire Déco
La trajectoire décorative est une animation d'attente qui consiste à balayer la vitrine.