Dans la fenêtre Tool Frames, on retrouve les quatre outils créés pour la machine Salon. Leur paramétrage a été déterminé à partir de mesures issues du modèle 3D, en utilisant la méthode Direct Entry.
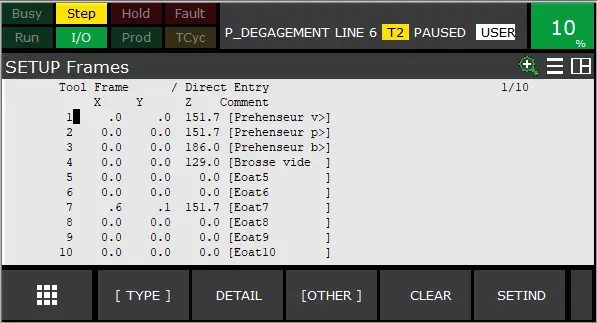
Figure 48 : Menu Tool Frame
Le chemin d’accès aux paramètres est : MENU → SETUP → Frames → Other → Tool Frame
Le changement d’outil permet au robot de connaître la géométrie réelle de l’outil monté sur l’axe 6. Cela lui permet de :
- Éviter les collisions ;
- Optimiser les trajectoires ;
- Garantir la précision des mouvements cartésiens.
Les coordonnées X, Y, Z, W, P, R définissent le TCP (Tool Center Point), c’est-à-dire le point de référence de l’outil utilisé pour tous les calculs de trajectoire.
L’inconvénient de la pince sur le robot est la gestion des câbles qui la relie. Il faut faire attention de pas les endommager lors des trajectoires.
Préhenseur vide :
Le préhenseur est le système de pinces. L’outil le plus utilisé est quand aucune pièce ne se trouve entre les pinces :
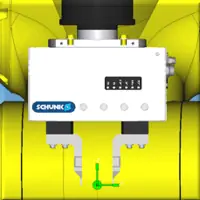
Figure 49 : TCP vert pince vide
Le robot ne transporte pas de pièce. Cet outil permet d’assurer la liaison entre les différents programmes et d’exécuter les trajectoires les plus rapides. En effet, il n’y a aucun risque de chute ni de contrainte liée à la forme ou à la surface d’un objet.
Dans Tool Frame Direct Entry Frame Number: 1 Comment: 1 [Prehenseur vide]
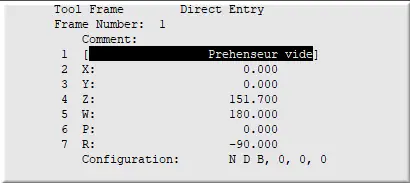
Figure 50 : Tool Frame Prehenseur vide
Lors de la création d’un outil, le vecteur Z est normalement aligné dans la continuité de l’axe 6. Cependant, dans notre standard, ce vecteur est inversé afin d’obtenir une meilleure cohérence lors de la programmation. Nous appliquons donc une rotation de 180° .
Pour faciliter le passage et l’orientation des câbles, l’outil est également pivoté de -90°, ce qui améliore l’ergonomie et réduit les contraintes mécaniques.
Il existe également un autre paramètre important à renseigner dans le robot lors de la création d’un outil : les payloads. Les payloads correspondent au poids total présent sur l’axe 6, incluant l’outil, les accessoires et la pièce transportée.
Dans Propriétés de masse :
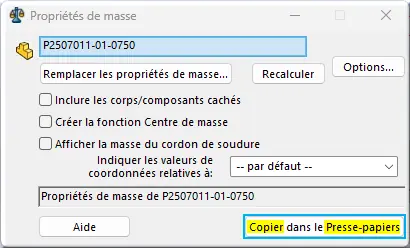
Figure 51 : Payload SolidWorks Vide
- Cliquez sur "Copier dans le Presse-papiers".
Propriétés de masse de P2507011-01-0750
- Configuration: Défaut
- Système de coordonnées: -- par défaut --
Masse = 1.2216 kilogrammes. Volume = 0.0006 mètres cubes. Superficie = 0.0883 mètres carrés
Centre de gravité : (mètres) X = 0.0000 Y = -0.0003 Z = 0.0514
Principaux axes et moments d'inertie : (kilogrammes * mètres carrés)
Pris au centre de gravité :
- Ix = (0.0027, 1.0000, 0.0041) Px = 0.0012
- Iy = (-0.0020, -0.0041, 1.0000) Py = 0.0019
- Iz = (1.0000, -0.0027, 0.0041) Pz = 0.0026
Moments d'inertie : (kilogrammes * mètres carrés)
Pris au centre de gravité et aligné avec le système de coordonnées de sortie. (En utilisant la notation de tenseur positive.)
- Lxx = 0.0026 Lxy = 0.0000 Lxz = 0.0000
- Lyx = 0.0000 Lyy = 0.0012 Lyz = 0.0000
- Lzx = 0.0000 Lzy = 0.0000 Lzz = 0.0019
Moments d'inertie : (kilogrammes * mètres carrés)
Pris au système de coordonnées de sortie. (En utilisant la notation de tenseur positive.)
- Ixx = 0.0058 Ixy = 0.0000 Ixz = 0.0000
- Iyx = 0.0000 Iyy = 0.0044 Iyz = 0.0000
- Izx = 0.0000 Izy = 0.0000 Izz = 0.0019
Un ou plusieurs composants ont des propriétés de masse remplacées :
EGI-040-EI-V4.1
Ce poids a été déterminé à l’aide du logiciel de modélisation 3D SolidWorks, ce qui permet d’obtenir une valeur précise et fiable pour la configuration du robot.
Pour accéder aux paramètres des payloads, utilisez le chemin suivant : MENU → NEXT → SYSTEM → 6 Motion.
Dans MOTION PERFORMANCE :
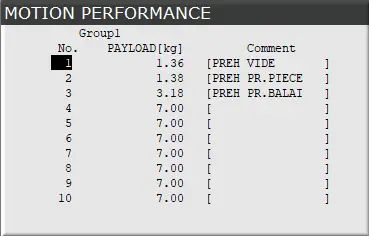
Figure 52 : MOTION PERF PAYLOAD
No. 1 PAYLOAD [kg]: 1.36 Comment: [PREH VIDE]
Dans MOTION/PAYLOAD SET :
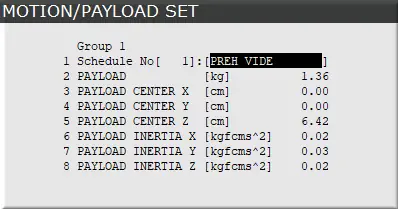
Figure 53 : PREH VIDE PAYLOAD
Group 1.
1 Schedule No [1] : [PREH VIDE]
2 PAYLOAD [kg] 1.36
Préhenseur Plein :
Le préhenseur plein est l’outil utilisé lorsque le robot transporte une pièce (une lettre) entre ses pinces.
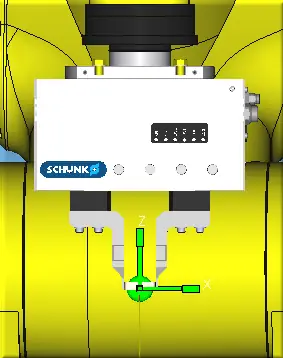
Figure 54 : Tool TCP Plein
Dans ce cas, la vitesse est réduite afin d’éviter tout risque de chute ou de perte de la pièce pendant les déplacements.
Payload dans SolidWorks pour l’outil plein avec une lettre entre les pinces :Propriétés de masse de P2507011-01-0750Masse = 1.2232 kg
Remplacer les propriétés de masse. Recalculer.
Dans MOTION/PAYLOAD SET :
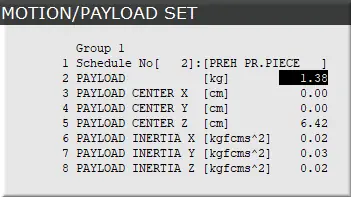
Figure 55 : PREH PR.PIECE
Group 1.
1 Schedule No [2] : [PREH PR.PIECE]
2 PAYLOAD [kg] 1.38
Préhenseur Balai :
Le préhenseur balai est l’outil équipé du balai pour pousser les pièces dans le bac :
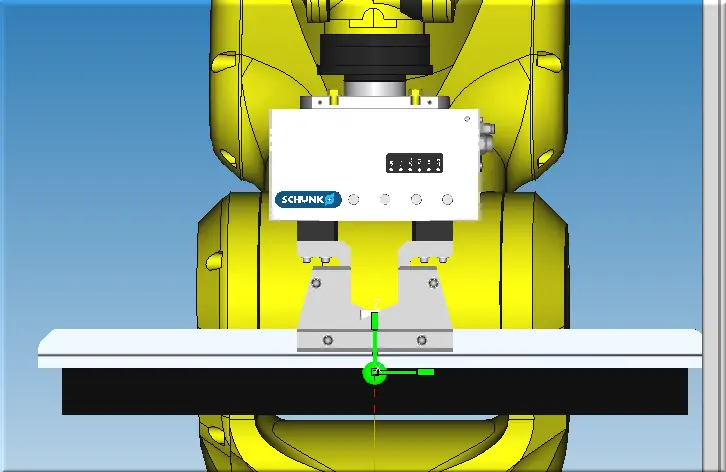
Figure 56 : Tool TCP Balai noir
Il présente à la fois un risque de chute et une grande superficie. Pour ces raisons, la vitesse du robot est réduite lors de son utilisation afin de garantir la sécurité et d’éviter tout mouvement brusque pouvant endommager l’outil ou la cellule.
Le payload de l’outil balai doit également être déterminé via SolidWorks.
Masse = 1,5466 kilogrammes
Cette étape permet d’obtenir une estimation précise du poids total appliqué sur l’axe 6, incluant le balai, son support, les fixations et tout accessoire associé. La valeur obtenue doit ensuite être renseignée dans le robot afin d’assurer un comportement dynamique correct et éviter toute surcharge ou erreur de compensation.
Dans MOTION/PAYLOAD SET :
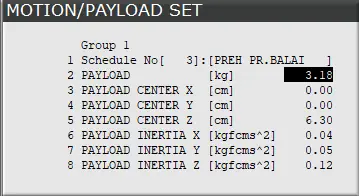
Figure 57 : Poids du BALAI
Group 1.
1 Schedule No [3] : [PREH PR.BALAI]
2 PAYLOAD [kg] 3.18