Mode de déplacement articulaire (Joint).
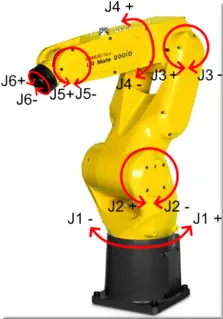
Figure 17 : articulation J6 - J1
Dans cette posture, chaque axe est à 0°sauf l’axe J5 qui est à environ -45°.
En mode Joint, le robot déplace chaque axe indépendamment, ce qui permet un mouvement fluide basé directement sur les positions des articulations.
- J1 : AXIS 1 Base Rotation - axe de rotation de la base ;
- J2 : AXIS 2 Shoulder Pitch - axe d'inclinaison de l'épaule ;
- J3 : AXIS 3 Upper Arm Pitch - axe d'inclinaison du bras supérieur ;
- J4 : AXIS 4 Elbow Pitch - axe d'inclinaison du coude ;
- J5 : AXIS 5 Forearm Pitch - axe d'inclinaison de l'avant-bras ;
- J6 : AXIS 6 Wrist Pitch - axe d'inclinaison du poignet.
Repère outil : TOOL
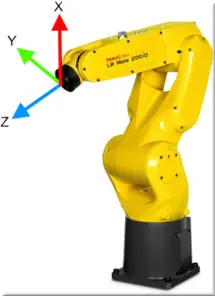
Figure 18 : Coord Tool XYZ
Le repère TOOL correspond au référentiel outil. Il doit être défini pour pouvoir enseigner correctement les points de trajectoire. Ce repère est un système de coordonnées cartésiennes dont l’origine est le TCP, c’est-à-dire le Point Centre Outil (Tool Center Point).
Repère universel : WORLD
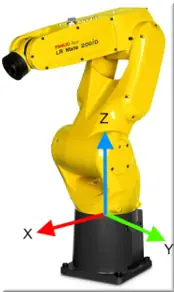
Figure 19 : Coord World XYZ
Le repère WORLD correspond au référentiel du robot. Il est prédéfini et ne peut donc pas être modifié.
Repère utilisateur : USER FRAME
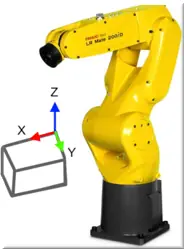
Figure 20 : Coord User frame XYZ
Le repère USER FRAME correspond au référentiel utilisateur, ou référentiel objet. Il peut être défini librement à n’importe quel emplacement et sert de repère de référence pour toutes les positions enregistrées dans un programme.