
Figure 5 : Teach Pendant GNE2
Le Teach Pendant graphique a la forme d'une tablette portable dotée d'un écran et d'un clavier dédié. Elle comporte :
- Un bouton-poussoir d’arrêt d’urgence ;
- Un commutateur ON/OFF (activation du Teach Pendant) ;
- L’ensemble des touches de commande (déplacements, vitesse, coordonnées, menus) ;
- Un dispositif de sécurité appelé Deadman (homme mort) au dos.
Elle constitue l’interface de commande principale entre l’armoire de commande et l’opérateur. Directement reliée à l’unité centrale par un câble, elle permet de réaliser l’ensemble des opérations de conduite et de paramétrage du robot.
Elle est utilisée pour :
- Déplacer le robot en mode manuel ;
- Arrêter le robot ;
- Régler la vitesse de déplacement ;
- Sélectionner les différents repères (TOOL, USER, WORLD) ;
- Sélectionner les modes de déplacement ;
- Commander les mouvements manuels (fermeture/ouverture du préhenseur) ;
- Afficher les défauts, attentes et inhibitions ;
- Créer et modifier les parcours (trajectoires) ;
- Tester les programmes ;
- Accéder aux données internes (E/S, registres) ;
- Réaliser les sauvegardes et restaurations de programmes ;
- Réaliser le calibrage du robot.
2.1 Équipement Teach Pendant
Présentation du Teach Pendant.
Bouton d’arrêt d’urgence :

Figure 6 : Bouton d'arrêt d'urgence
Situé en haut à droite au-dessus de l'écran, le bouton d’arrêt d’urgence permet d’arrêter le robot et l’installation si elle est connectée.
Commutateur d’activation ou désactivation du Teach Pendant :

Figure 7 : switch mode Auto Manu
Le commutateur permet d’activer le Teach Pendant pour modifier des programmes ou pour déplacer le robot manuellement.
- ON : Activé (mode manuel) ;
- OFF : Désactivé. On ne peut plus modifier le programme (mode automatique).
Boutons de déplacement :

Figure 8 : Boutons de déplacement Teach
En maintenant le bouton SHIFT et en appuyant sur l'un des boutons JOG bleus, le robot se déplace selon le mode souhaité.
- Boutons -/+ J4 à J6 en mode rotation;
- Boutons -/+ X à Z en mode translation;
- Boutons -/+ J7 à J8 supplémentaires pour l’ajout d’autres axes.
Boutons fonctions :

Figure 9 : Touches de fonctions
- PREV : retourne à la fenêtre précédente ;
- F1 à F5 : touches de fonction exécutant l’action indiquée dans le champ situé juste au-dessus, en bas de l’écran ;
- NEXT : affiche les fonctions suivantes.
Barre TEACH de boutons principaux :

Figure 10 : Boutons SELECT EDIT
- MENUS : ouvre le menu principal ;
- SELECT : affiche la liste des programmes TPE (Teach Pendant Editor) pour consulter, créer, modifier ou sélectionner un programme ;
- EDIT : ouvre la fenêtre d’édition et permet de modifier le dernier programme sélectionné ;
- DATA : donne accès aux variables utilisateur (registres, registres de position) ;
- FCTN : ouvre le menu des fonctions.
Boutons gestion de programme :

Figure 11 : Boutons STEP HOLD
- STEP : met le programme en mode pas à pas ;
- HOLD : arrête le robot ;
- FWD : Forward exécute le programme vers l'avant. Pour l’activer, maintenez le bouton SHIFT ;
- BWD : Backward exécute le programme à l’envers. Pour l’activer, maintenez le bouton SHIFT.
Boutons mode de déplacement et réglage vitesse :

Figure 12 : Bouton COORD Speed
COORD : Touche de sélection du mode de déplacement manuel. Permet de choisir le mode de déplacement (JOINT, USER, WORLD).
En maintenant le bouton SHIFT et en appuyant sur cette touche, vous pouvez :
- Sélectionner le référentiel de travail souhaité ;
- Changer de groupe d’axes.
Boutons de réglage vitesse plus ou moins :
- Bouton △ +% : augmente la vitesse de 5 %. En maintenant le bouton SHIFT, la vitesse augmente de 50% ;
- Bouton ▽ -% : diminue la vitesse de 5%. En maintenant le bouton SHIFT, la vitesse diminue de 50%.
Boutons utilitaires :
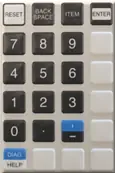
Figure 13 : Boutons RESET ENTER
- RESET : remet à zéro les alarmes du robot ;
- BACKSPACE : en mode de saisie de texte, cette touche supprime le caractère situé immédiatement à gauche du curseur ;
- ITEM : pour déplacer le curseur à l’écran sur la ligne désirée ;
- ENTER : bouton de validation ↵ d'une valeur numérique ou pour sélectionner un menu ;
- Pavé numérique : permet de saisir des valeurs sans passer par l’écran ;
- Macros : les macros permettent de créer des raccourcis. Elles sont souvent utilisées pour ouvrir ou fermer les pinces connectées au robot, par exemple.
Bouton division d’écran :

Figure 14 : Bouton DISP
Le bouton DISP permet, en maintenant le bouton SHIFT, de démultiplier l’écran.
Au dos du Teach Pendant graphique, le bouton DeadMan :

Figure 15 : Sécurité DeadMan manuel
Le DeadMan est un dispositif de sécurité. C’est l’une des conditions qui permet de démarrer le robot en mode manuel.
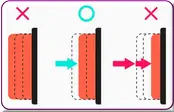
Figure 16 : instruction deadman
⇨ ⇨ Si le bouton du DeadMan est trop enfoncé ou qu’il soit relâché alors il y a un défaut et le robot s’arrête directement ou ne démarre pas.