3.1 G7 Coordination de vérins
Dans le Grafcet des vérins horizontal et vertical :
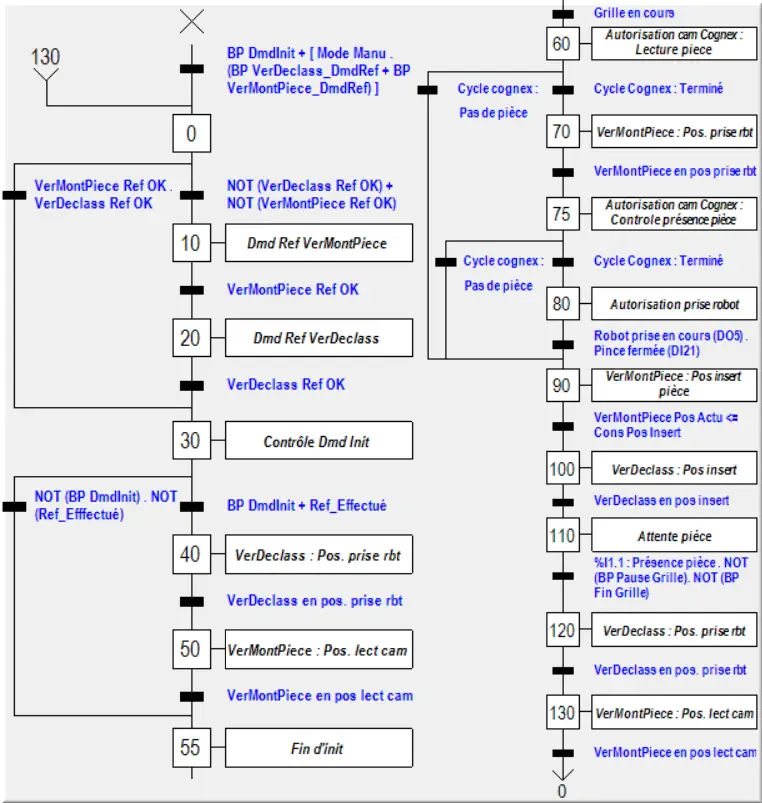
Figure 8 : G7 VerDeclass VerUpPiece
Pour le pilotage des vérins horizontal et vertical, un Grafcet de gestion des vérins a été mis en place. Ce dernier coordonne l'acheminement des pièces, par le biais du vérin horizontal, depuis le bol vibrant vers le rail vibrant, puis positionne la pièce, grâce au vérin vertical, pour permettre sa reconnaissance par la caméra COGNEX et sa prise par le robot. Il assure également la synchronisation de ces opérations.
La liste complète des réseaux présente la représentation du Grafcet dans le programme automate :
- Réseau 1 : DONNEES GENERALES
- Réseau 2 : Prise en compte des données pour mode pas à pas
- Réseau 3 : Gestion des fronts
- Réseau 4 : Autorisation d'avance dans la séquence
- Réseau 5 :
- Réseau 6 : Au moins une prise de référence effectuée : Init obligatoire
- Réseau 7 :
- Réseau 8 : GESTION DE LA SEQUENCE
- Réseau 9 : Initialisation séquence à étape 0
- Réseau 10 :
- Réseau 11 : ETAPE 0: ETAPE INITIALE
- Réseau 12 : Transition 0 vers 10
- Réseau 13 : Transition 0 vers 30
- Réseau 14 :
- Réseau 15 : ETAPE 10: REFERENCE MONT VERIN PIECE
- Réseau 16 : Transition 10 vers 20
- Réseau 17 :
- Réseau 18 : ETAPE 20: REFERENCE MONT VERIN DECLASSEUR
- Réseau 19 : Transition 20 vers 30
- Réseau 20 :
- Réseau 21 : ETAPE 30: CONTROLE SI INIT A EFFECTUER
- Réseau 22 : Transition 30 vers 40
- Réseau 23 : Transition 30 vers 60
- Réseau 24 :
- Réseau 25 : ETAPE 40: AVANCE DECLASSEUR
- Réseau 26 : Transition 40 vers 50
- Réseau 27 :
- Réseau 28 : ETAPE 50: POSITION VERIN MONT PIECE
- Réseau 29 : Transition 50 vers 55
- Réseau 30 :
- Réseau 31 : ETAPE 55: FIN D'INIT- CONTROLE GRILLE EN COURS
- Réseau 32 : Transition 55 vers 60
- Réseau 33 :
- Réseau 34 : ETAPE 60 : AUTORISATION CAMERA COGNEX
- Réseau 35 : Transition 60 vers 70
- Réseau 36 : Transition 60 vers 70
- Réseau 37 :
- Réseau 38 : MONTER VERIN MONT. PIECE
- Réseau 39 : Transition 70 vers 75
- Réseau 40 :
- Réseau 41 : ETAPE 75 : CONTROLE PIECE TOUJOURS PRESENTE
- Réseau 42 : Transition 75 vers 80
- Réseau 43 : Transition 75 vers 90
- Réseau 44 :
- Réseau 45 : ETAPE 80 : AUTORISATION PRISE ROBOT
- Réseau 46 : Transition 80 vers 90
- Réseau 47 :
- Réseau 48 : DESCENTE VERIN MONT. PIECE
- Réseau 49 : Transition 90 vers 100
- Réseau 50 :
- Réseau 51 : RECULE VERIN DECLASSEUR
- Réseau 52 : Transition 100 vers 110
- Réseau 53 :
- Réseau 54 : ATTENTE PIECE
- Réseau 55 : Transition 110 vers 120
- Réseau 56 :
- Réseau 57 : AVANCE VERIN DECLASSEUR
- Réseau 58 : Transition 120 vers 130
- Réseau 59 :
- Réseau 60 : POSITION LECTURE VERIN MONT. PIECE
- Réseau 61 : Transition 130 vers 0
- Réseau 62 :
- Réseau 63 : Fin de la séquence
- Réseau 64 :
- Réseau 65 : ACTIONS DU GRAFCET
- Réseau 66 : Gestion des compteurs par étape
- Réseau 67 :
- Réseau 68 : ACTIONS
- Réseau 69 : Autorisation cycle caméra COGNEX - Trigger photo et traitement résultat
- Réseau 70 : Caméra cognex - Contrôle présence pièce à la prise robot
- Réseau 71 : Autorisation de suivi ZONE 0 vers ZONE 1 et RAZ ZONE 0
- Réseau 72 : Autorisation de prise pour le robot
- Réseau 73 : Attente chargement pièce
- Réseau 74 :
- Réseau 75 : Verin déclasseur : Demande prise de référence
- Réseau 76 : Verin déclasseur : Demande position insertion pièce
- Réseau 77 : Verin déclasseur : Demande position prise robot
- Réseau 78 :
- Réseau 79 : Verin monte pièce : Demande prise de référence
- Réseau 80 : Verin monte pièce : Demande position insertion pièce
- Réseau 81 : Verin monte pièce : Demande position lecture pièce
- Réseau 82 : Verin monte pièce : Demande position prise robot
Représentation de gestion du vérin vertical Déclasseur :
- Réseau 1 : GESTION DU VERIN DECLASSEUR
- Réseau 2 : Prise d'origine
- Réseau 3 : Jog mode
- Réseau 4 : Mode de fonctionnement absolue
- Réseau 5 : Mode position / effort
- Réseau 6 : Consigne de vitesse
- Réseau 7 : Consigne de position
- Réseau 8 : Bornage consignes de position
- Réseau 9 : Reset de l'action
- Réseau 10 : Commande
- Réseau 11 :
- Réseau 12 : FB Gestion du vérin déclassseur
- Réseau 13 :
- Réseau 14 : Position d'insertion pièce atteinte
- Réseau 15 : Position de prise pièce robot atteinte
- Réseau 16 :
Dans Réseau 2 : Prise d’origine
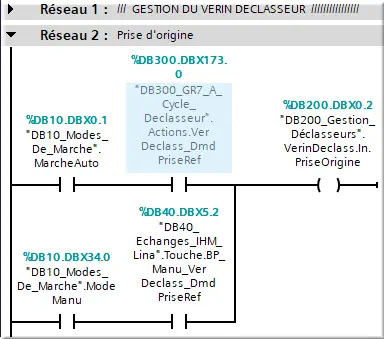
Figure 9 : net2 Prise d’origine
Le réseau 2, "Prise d'origine" (Acquisition d'origine), amène le vérin à sa position de référence, permettant ainsi un positionnement précis et reproductible pour la reconnaissance par la caméra.
Ce réseau est activé par la commande MarcheAuto, via le DB300 Grafcet Demande de prise de référence, et utilise un retour de position pour s'assurer que le vérin s'arrête précisément à la position désirée. Une fois la position d'origine atteinte, un signal indique le succès de l'opération.
Dans Réseau 3 : Jog mode
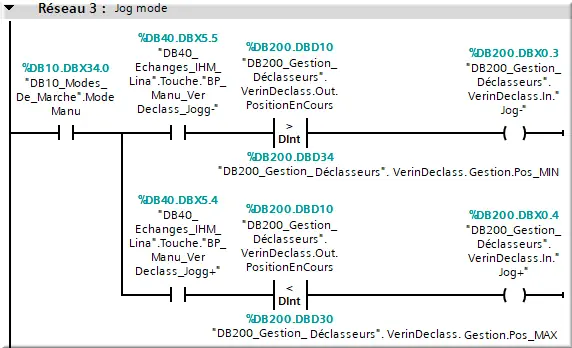
Figure 10 : net3 Jog mode
Le réseau 3 "Jog mode" permet le déplacement manuel du vérin. Il compare la position actuelle à une consigne min/max définie dans le DB300. Le vérin avance si la position actuelle est inférieure à la consigne minimale, ou recule si elle est supérieure à la consigne maximale.
Dans Réseau 4 : Mode fonctionnement absolu
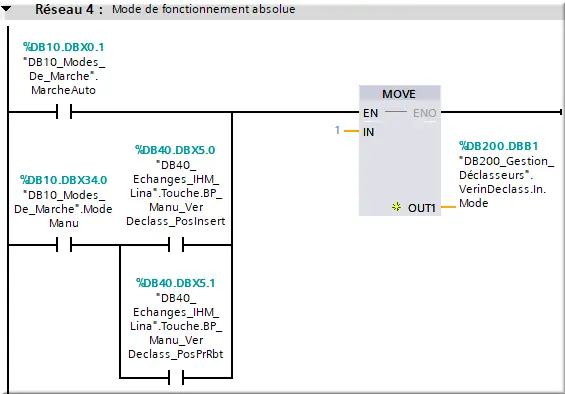
Figure 11 : net4 Mode fnc abs
Le réseau 4, "Mode fonctionnement absolu", active le déplacement du vérin (EN) en fonction d'une condition. Ce mode est lié à un positionnement d'insertion pièce et un positionnement robot, pilotant un mouvement en sortie (OUT1).
Dans Réseau 5 : Mode position effort
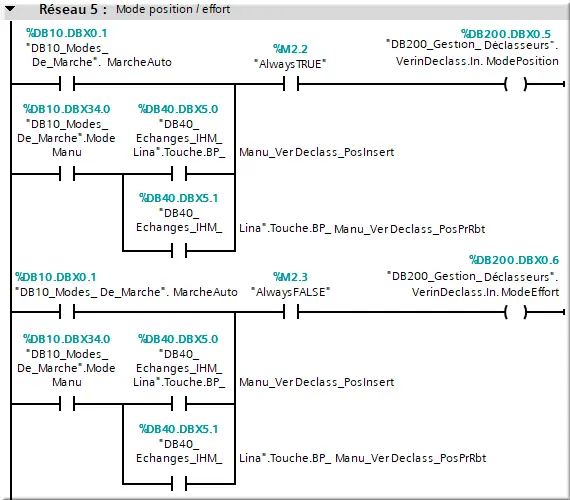
Figure 12 : net5 Mode position effort
Le réseau 5, "Mode position/effort", sélectionne entre deux modes : "Mode Position" (via une condition toujours vraie) et "Mode Effort" (via une condition toujours fausse). Il gère la commutation entre le contrôle en position et le contrôle en effort du vérin, en fonction de l'état de ces conditions.
Dans Réseau 6 : Consigne vitesse
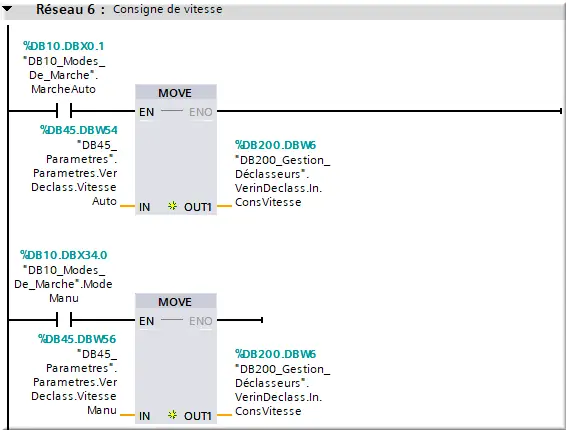
Figure 13 : net6 Consigne vitesse
Le réseau 6, "Consigne vitesse", détermine la vitesse de déplacement du vérin. Un signal IN provenant du DB45 (paramètres de vitesse) active un signal de sortie (OUT1) qui commande le mouvement avec la vitesse configurée. Essentiellement, ce réseau applique la consigne de vitesse définie ailleurs.
Dans Réseau 7 : Consigne de position
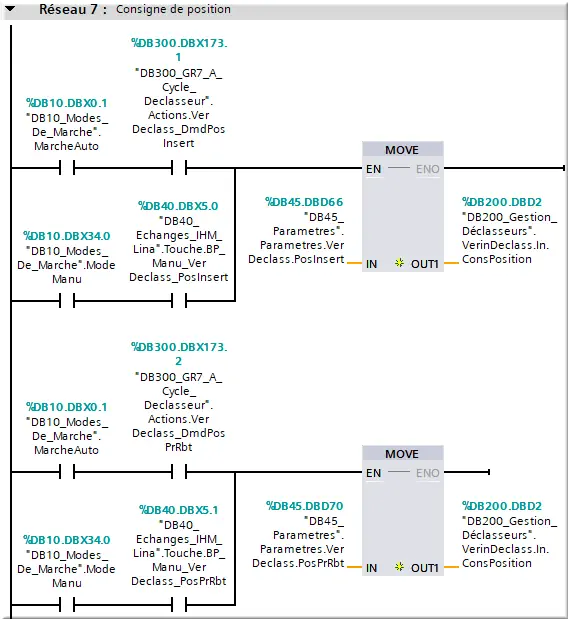
Figure 14 : net7 Consigne de position
Le réseau 7, "Consigne de position", détermine la position cible du vérin. Il reçoit une consigne de position (IN) issue du DB45 (paramètres de position) et la transmet vers le système de commande (OUT1), dictant ainsi la position à atteindre par le vérin.
Dans Réseau 8 : Bornage consigne position
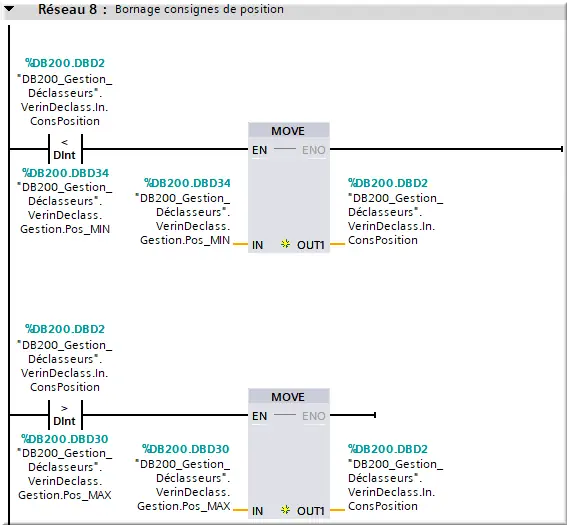
Figure 15 : net8 Bornage consigne pos
Le réseau 8, "Bornage consigne position", limite la consigne de position. Il compare la consigne de position entrante (IN) avec des limites minimales et maximales (MIN et MAX). Si la consigne est inférieure à la limite minimale ou supérieure à la limite maximale, la sortie (OUT1) est bloquée, empêchant le mouvement en dehors de cette plage définie.
Dans Réseau 9 : Reset de l'action
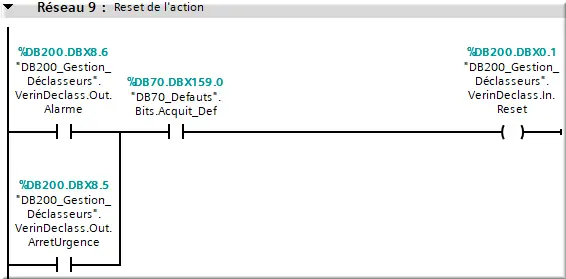
Figure 16 : net9 Reset action
Le réseau 9, "Reset action", gère le RESET du système. Il est activé par deux conditions : un signal Acquit_Defaut provenant du DB70 (gestion des défauts) et un signal d'arrêt d'urgence. Lorsque ces deux conditions sont remplies, le réseau réinitialise l'état du vérin (via le DB200).
Dans Réseau 10 : Commande
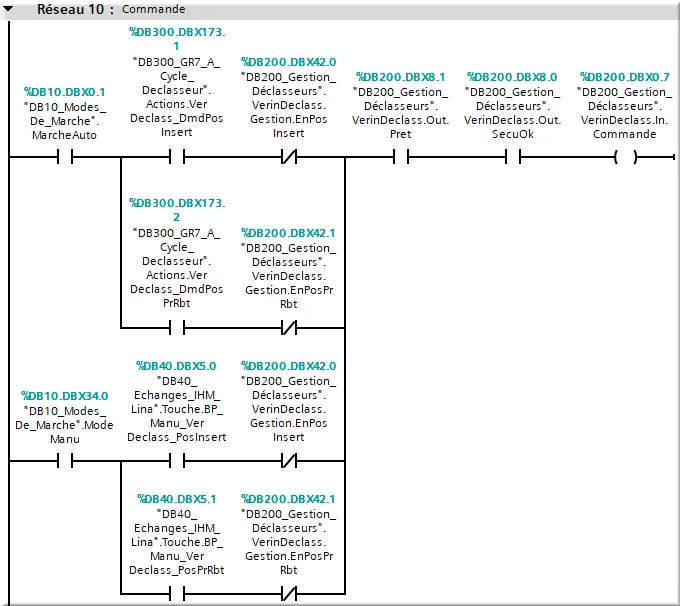
Figure 17 : net10 Commande
Le réseau 10, "Commande", est un point de coordination central de déclenchement de la commande du vérin. Il reçoit des entrées provenant de multiples sources : le DB300, le DB200 (plusieurs bits, notamment liés à la position et à la pré-tension), et des entrées liées à la sécurité et à la position.
La combinaison de ces entrées, via des portes logiques détermine si le signal de commande final (vers le DB200) est activé. C'est un nœud important pour l'activation du mouvement et de ses paramètres.
Dans Réseau 14 : Position d’insertion pièce atteinte
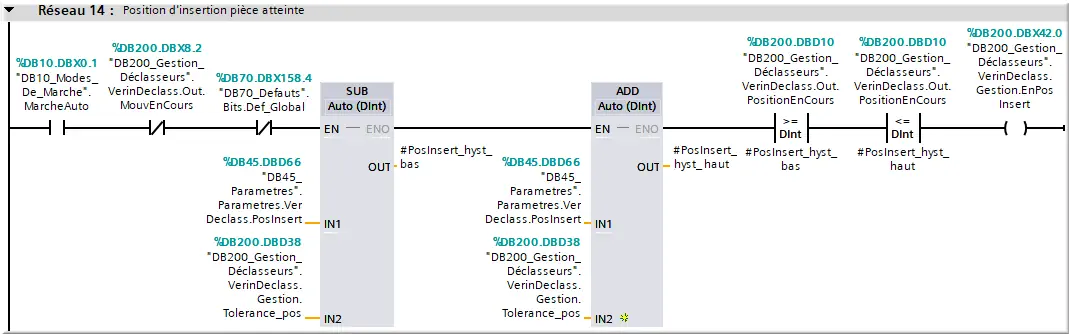
Figure 18 : net14 Pos insert pièce
Le réseau 14, "Position d'insertion pièce atteinte", vérifie si la position actuelle du vérin (IN1) est à l'intérieur d'une plage de tolérance autour de la position cible (IN2). Il utilise des hystérésis (">=" et "<=") pour éviter les oscillations autour de la position cible.
Il prend en compte une valeur basse (OUT_bas) et une valeur haute (OUT_haut) provenant du DB45 (paramètres) pour définir la tolérance. Si la position actuelle est dans la plage, le réseau active une sortie (EN), indiquant que la position d'insertion a été atteinte.
Dans Réseau 15 : Position de prise pièce robot atteinte
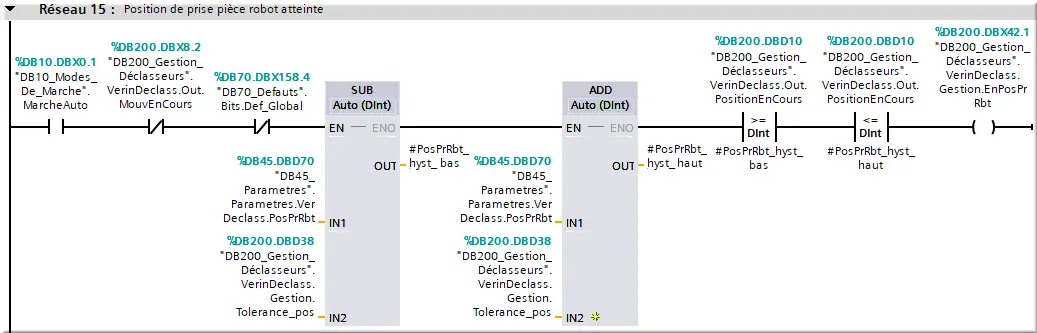
Figure 19 : net15 pos prise pièce
Le réseau 15, "Position de prise pièce robot atteinte", fonctionne de manière très similaire au réseau 14 ("Position d'insertion pièce atteinte"). Il vérifie également si la position actuelle du vérin (IN1) se situe dans une plage de tolérance définie (entre une valeur basse et une valeur haute, provenant du DB45 - paramètres) autour de la position cible (IN2). L'utilisation d'hystérésis (comparaisons >= et <=) évite les oscillations. Si la position est dans la plage définie, une sortie (EN) est activée, signalant que la position de prise robot a été atteinte.