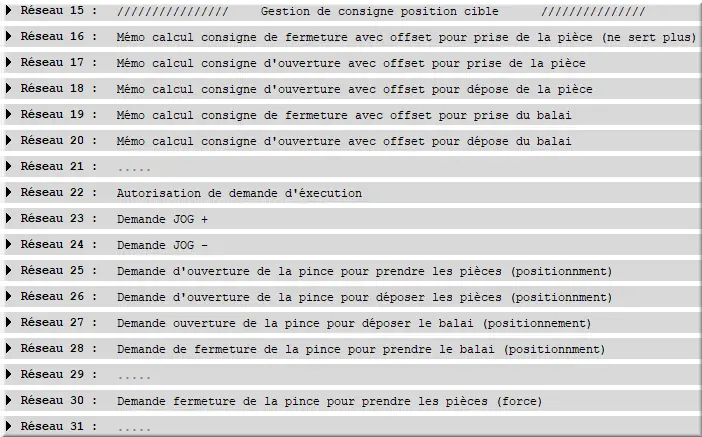
Figure 37 : Net15 consigne to 31
- Réseau 15 : Gestion de la consigne de position cible
- Réseau 16 :
Mémorisation calcul de fermeture avec offset pour prise de la pièce - Réseau 17 : Mémorisation du calcul d'ouverture avec offset pour la prise de la pièce
- Réseau 18 : Mémorisation du calcul d'ouverture avec offset pour le dépôt de la pièce
- Réseau 19 : Mémorisation du calcul de fermeture avec offset pour la prise du balai
- Réseau 20 : Mémorisation du calcul d'ouverture avec offset pour le dépôt du balai
- Réseau 21 : ...
- Réseau 22 : Autorisation de la demande d’exécution
- Réseau 23 : Demande de mouvement JOG +
- Réseau 24 : Demande de mouvement JOG -
- Réseau 25 : Demande d'ouverture de la pince pour la prise des pièces (positionnement)
- Réseau 26 : Demande d'ouverture de la pince pour le dépôt des pièces (positionnement)
- Réseau 27 : Demande ouverture de la pince pour le dépôt du balai (positionnement)
- Réseau 28 : Demande de fermeture de la pince pour la prise du balai (positionnement)
- Réseau 29 : ...
- Réseau 30 : Demande de fermeture de la pince pour la prise des pièces (force)
- Réseau 31 : ...
Réseau 17 : Mémo calcule consigne d'ouverture avec offset pour prise de la pièce.
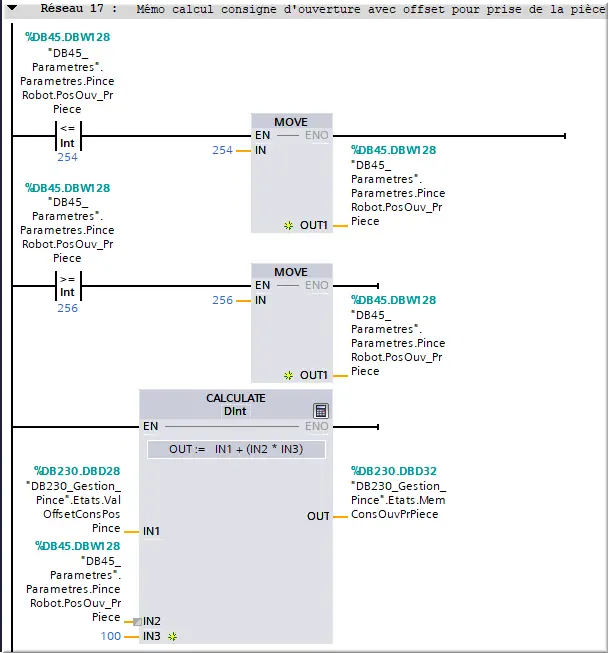
Figure 38 : net17 Mémo calcule consigne
Ce réseau calcule et limite la consigne d'ouverture ou de fermeture de la pince. Il est utilisé pour chaque position de la pince, permettant d'ajuster précisément le mouvement en fonction des besoins spécifiques. Le résultat de ce calcul est stocké pour une utilisation ultérieure.
Réseau 22 : Autorisation de demande d’exécution.
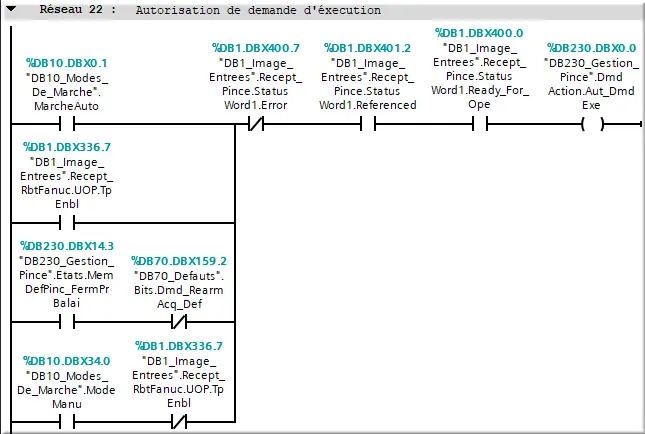
Figure 39 : net22 autorisation dmd exécution
Ce réseau définit les conditions requises pour autoriser l'exécution des commandes de la pince. Il assure que toutes les prérequis sont remplis avant de lancer un mouvement.
Réseau 23 et 24 : JOG plus ou moins.
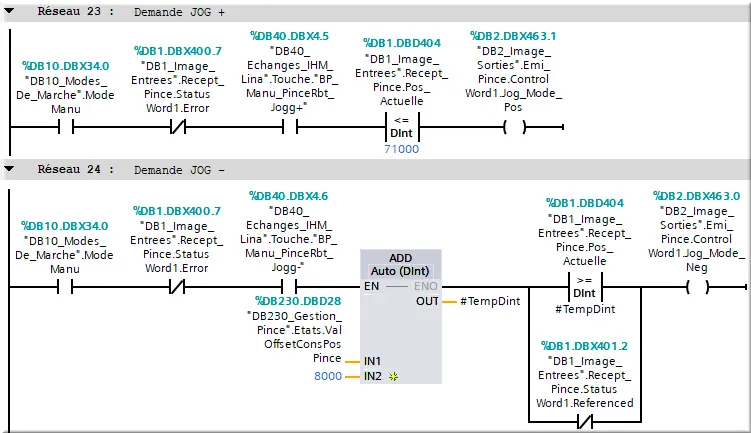
Figure 40 : net23 JOG plus
Le mode JOG permet de déplacer la pince sans position cible précise, utile pour l'ajustement manuel. Le "JOG +" permet de fermer la pince, et le "JOG -" permet de l'ouvrir.
Réseau 25 : Demande d'ouverture de la pince pour prendre les pièces (positionnement).
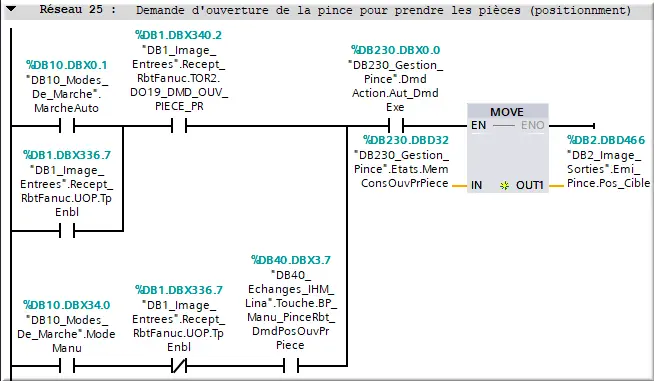
Figure 41 : net25 dmd ouverture
Écriture de la consigne dans la pince pour un mouvement absolu. On peut retrouver l’autorisation et le bit de demande.
Ce réseau envoie la consigne de position à la pince, déclenchant un mouvement absolu. Il inclut l'autorisation et le bit de demande d'ouverture.
Réseau 30 : Demande fermeture de la pince pour prendre les pièces (force).
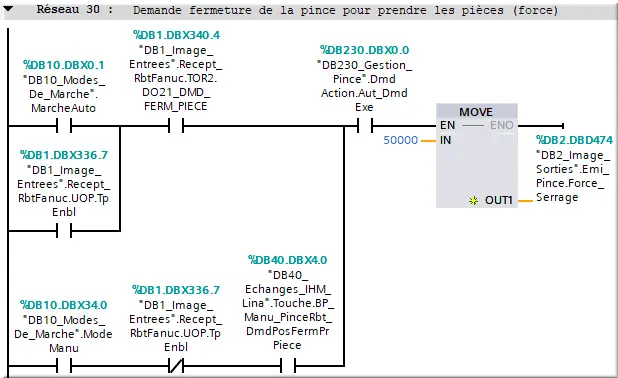
Figure 42 : net30 dmd fermeture
Ce réseau envoie la consigne de force à la pince, déclenchant un mouvement en mode force.