3.1 Page pilotage
Présentation de l'interface d'hypervision du logiciel Lina :

Figure 5 : Hypervision Pilotage Fanuc
- Bouton permettant d’accéder aux différentes catégories de l’IHM.
- Bouton permettant de sélectionner les différents menus afin de contrôler la machine.
- Boutons permettant la gestion de cycle.
- Boutons de modes de marche
- Zone de boutons variante selon le mode de marche choisis qui ouvre leurs pop-ups associer.
- Affichage du nom de l’of en cours.
- Affichage du nombre de pièces à déposer restante sur la grille.
- Affichage du nombre de pièces renvoyées dans le bac.
- Affichage de la vitesse du robot en pourcentage.
- Affichage des défauts /Défauts de la machine avec le bouton réarmement à droite.
Gestion de cycle :
- Bouton vert "Marche" : permet la mise en route de la machine
- Bouton orange Fin de cycle : permet de la fin du cycle en cours
- Bouton rouge "Arrêt" : permet de mettre en stop la machine
- Bouton bleu Réarmement : permet de réarmer les différents défauts sur la machine
Modes de marche :
- Bouton "Mode Automatique" : permet de mettre en mode automatique la machine permettant de faire des cycles.
- Bouton "Mode Manuel" : permet de mettre en mode manuel la machine permettant de faire Controller chaque élément indépendamment les uns des autres.
3.2 Page paramètres
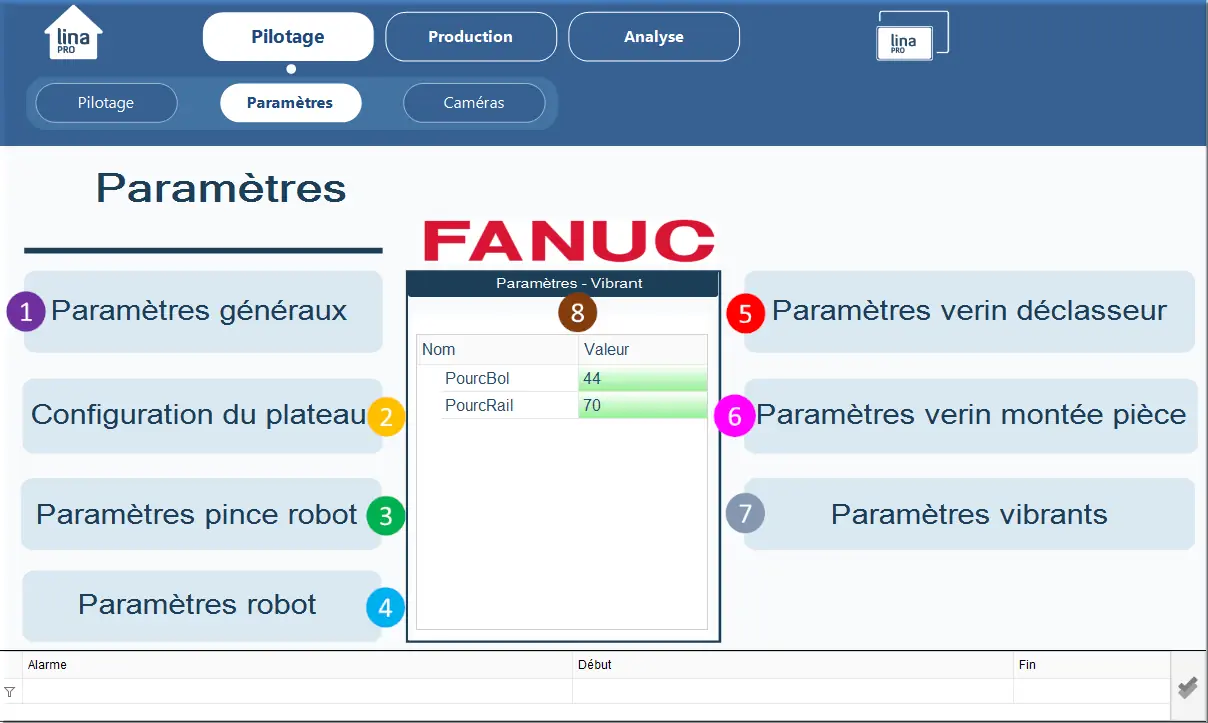
Figure 6 : Pilotage Paramètres Fanuc
- Bouton "Paramètres généraux"
TpsMaxVidange : Durée max vidange (en ms, par défaut 5 minutes)
TpsMaxNettoyage : Durée max nettoyage (en ms, par défaut 30 minutes) - Bouton "Configuration du plateau"
Plateau_NbrLigne : Nombre de ligne
Plateau_NbrColonne : Nombre de colonne
Plateau_CoordDepart_X : Coordonnées de départ du tableau en X (centre 1ere case / au coin du plateau - frame robot)
Plateau_CoordDepart_Y : Coordonnées de départ du tableau en Y (centre 1ere case / au coin du plateau - frame robot)
Plateau_Entraxe_X : Entraxe des cases en X
Plateau_Entraxe_Y : Entraxe des cases en Y
Piece_Longueur : Longueur d'une pièce
Piece_Largeur : Largeur d'une pièce
Piece_Hauteur : Définition des pièces : Hauteur d'une pièce
Piece_CotePosageInterne : Côte intérieure de hauteur du posage de la pièce sur vérin montée pièce - Bouton "Paramètres pince robot"
VitesseAuto : Vitesse de la pince en mode auto
VitesseManu : Vitesse de la pince en mode manu
PosFerm_PrPiece : Valeur position fermée pour prise pièce
PosOuv_PrPiece : Valeur position ouverte pour prise pièce
PosOuv_DepPiece : Valeur position ouverte pour dépose pièce
PosOuv_PrBalai : Valeur position ouverte pour prise balai
PosFerm_DepBalai : Valeur position fermée pour dépose balai
OffsetPhysiquePince : Offset physique de la pince (différence entre valeur pince et écartement réelle des mors) - Bouton "Paramètres robot"
VitAuto : Vitesse général du robot (en %)
Depose_X_Rebut_BAC : Cote de dépose pour le rebut bac en X - Bouton "Paramètres vérin déclasseur"
VitesseAuto : Vitesse du vérin en mode auto
VitesseManu : Vitesse du vérin en mode manu
Accélération : Rampe d'accélération
Décélération : Rampe de décélération
PosInsert : Valeur position pour insertion pièce (droite sens avance pièce - vérin rentrer)
PosPrRbt : Valeur position pour prise robot (gauche sens avance pièce - vérin sortie)
TpsPresPiece : Valeur tempo déclaration pièce présente dans déclasseur (en ms) - Bouton "Paramètres vérin montée pièce
"VitesseAuto : Vitesse du vérin en mode auto
VitesseManu : Vitesse du vérin en mode manu
Accélération : Rampe d'accélération
Décélération : Rampe de décélération
PosInsert : Valeur position pour insertion pièce (position basse - vérin rentrer)
PosLectCam : Valeur position pour lecture pièce par caméra (ajustement sous éclairage)
PosPrRbt : Valeur position pour prise robot (position haute - vérin sortie) - Bouton "Paramètres vibrants"
PourcBol : Pourcentage de vibration du bol (en %)
PourcRail : Pourcentage de vibration du rail (en %) - Affichage paramètres.
3.3 Pilotage automatique

Figure 7 : Gestion du plateau auto
- Bouton "Initialisation" : demande d'initialisation complète de l'installation ;
- Bouton "Pause grille" : permettant de mettre en pause la grille en cours ;
- Bouton "Vidange grille" : permettant de vider la machine grâce au robot dans le bac ;
- Bouton "Fin grille" : permettant de mettre fin à la grille en cours ;
- Bouton "Nouvelle grille" : permettant de remettre à zéro l’ancienne grille et lancement nouvelle grille.
3.4 Pilotage manuel

Figure 8 : Gestion vibrants manu
- Bouton "Gestion vibrants" : permettant d’ouvrir un popup de gestion des vibrants ;
- Bouton "Gestion vérins" : permettant d’ouvrir un popup de gestion des vérins ;
- Bouton "Gestion robot" : permettant d’ouvrir un popup de gestion du robot.
Dans "Pilotage des vibrants" :

Figure 9 : Pilotage Bol Rail
Bouton : Marche continue : Le bol vibrant ou le rail vibrant est forcé en marche.
Afficheur : Consigne : Vitesse du bol vibrant ou rail vibrant en pourcentage.
Dans "Pilotage des vérins" électriques :
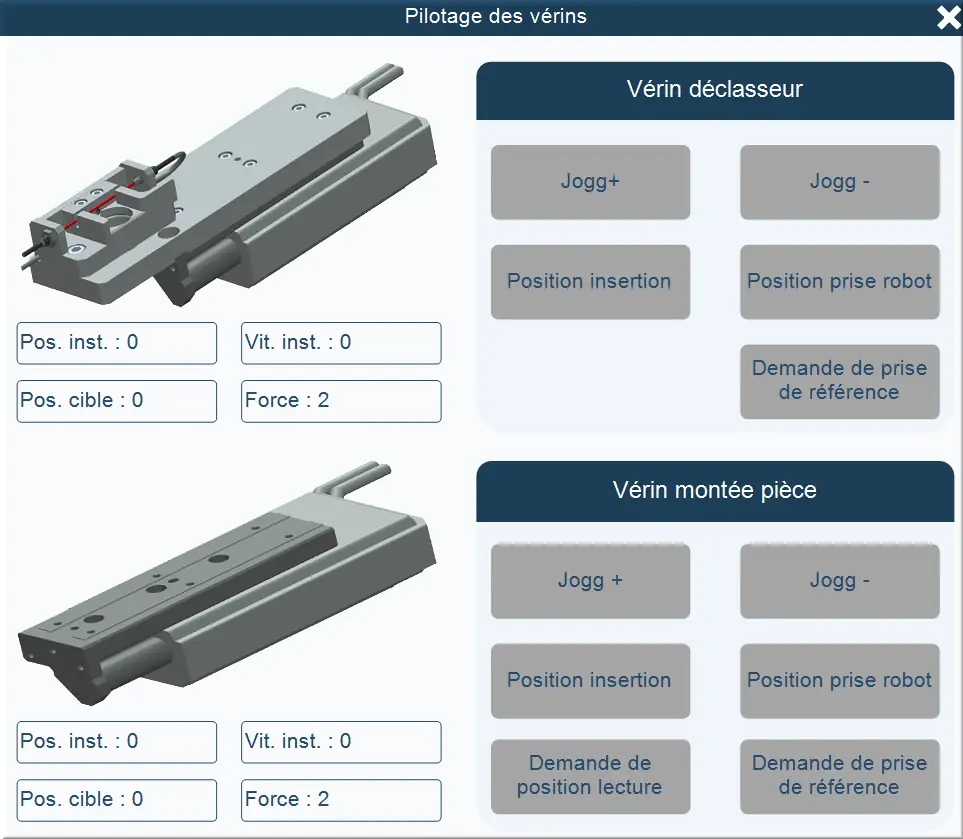
Figure 10 : Pilotage vérin déclasseur
Boutons :
- Jogg+ : Permet de faire avancer le vérin sans consigne.
- Jogg- : Permet de faire reculer le vérin sans consigne
- Position insertion : Position prédéfinie dans les paramètres pour permettre de prendre une pièce depuis le rail vibrant
- Position prise robot : Position prédéfinie dans les paramètres pour permettre la prise par le robot de la pièce.
- Demande de prise de référence : Permet le référencement du vérin
- Demande de position lecture : Position prédéfinie dans les paramètres pour permettre la prise de photo par la caméra Cognex.
Afficheurs :
- Position instantanée : Position en temps réelle des vérins
- Vitesse instantanée : Vitesse en temps réelle des vérins
- Position cible : La valeur prédéfinie afin d’arriver à bonne position.
Dans "Pilotage robot" :
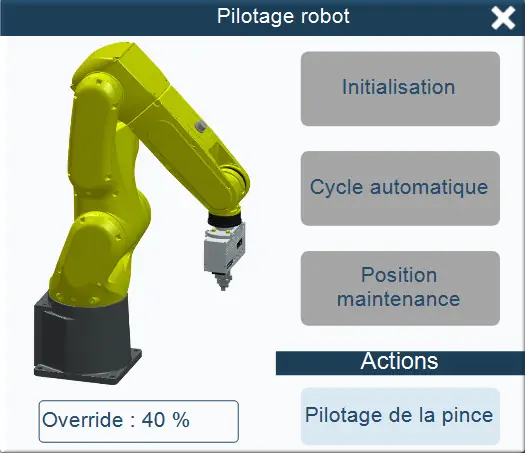
Figure 11 : Pilotage robot pince
Boutons :
- Initialisation : permet de mettre le robot en home.
- Cycle automatique : permet de mettre le robot en position pour un lancement en mode auto.
- Position maintenance : permet de mettre le robot en position de maintenance.
- Pilotage de la pince : permet d’ouvrir un popup permettant de piloter la pince.
Afficheurs : Vitesse : Vitesse du robot en pourcentage.
Dans le pilotage de la "Pince robot" :
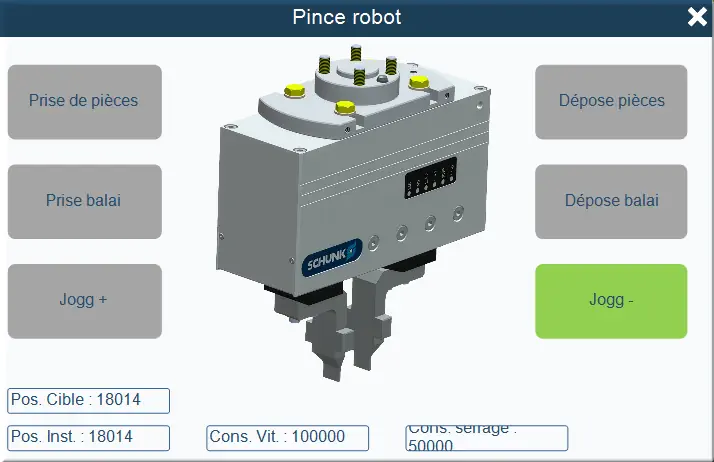
Figure 12 : Pince robot Jogg
Boutons :
- Jogg+ : Permet l’ouverture de la pince sans consigne.
- Jogg- : Permet la fermeture de la pince sans consigne.
- Prise de pièces : Position prédéfinie dans les paramètres pour permettre la fermeture de la pince pour la prise de pièces.
- Dépose pièces : Position prédéfinie dans les paramètres pour permettre l’ouverture de la pince pour la dépose pièces.
- Prise balai : Position prédéfinie dans les paramètres pour permettre l’ouverture de la pince pour la prise balai.
- Dépose balai : Position prédéfinie dans les paramètres pour permettre la fermeture de la pince pour la dépose balai.
Afficheurs :
- Position instantanée : Position en temps réelle de la pince.
- Consigne de vitesse : C’est la valeur prédéfinie afin d’arriver à bonne vitesse.
- Position cible : La valeur prédéfinie afin d’arriver à bonne position.
- Consigne de serrage : La valeur prédéfinie de serrage de la pince.