Dans I/O SETUP Frame: GET_HOME LINE 0 T2 ABORTED WORLD. 10%.
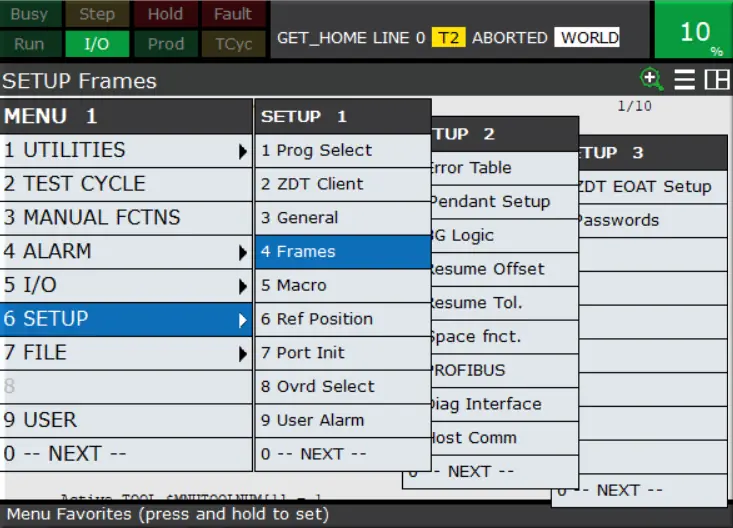
Figure 27 : Setup Frames MENU 1
- Cliquez sur MENU 1 > 6 SETUP > SETUP 1 > 4 Frames.
La création de l'outil Tool Frame est indispensable pour définir la dimension de l’objet à l’extrémité de l’axe J6 ainsi que le centre de l'outil (TCP), qui est le point d’équilibre.
Dans I/O SETUP Frame: GET_HOME LINE 0 T2 ABORTED WORLD. Tool Frame Direct Entry 1/10.
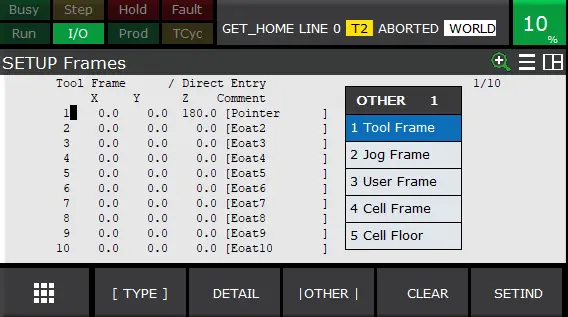
Figure 28 : Setup Tool Frame
Le Tool Frame est le système de coordonnées propre à l'outil.
Repère X Y Z
- Cliquez sur OTHER 1 > 1 Tool Frame.
Dans I/O SETUP Frame: GET_HOME LINE 0 T2 ABORTED WORLD. Tool Frame Direct Entry 10/10.
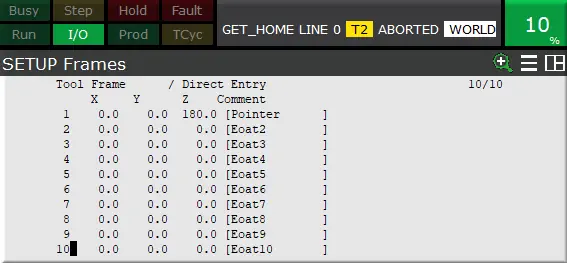
Figure 29 : Tool Frame 10
X Y Z Comment
1 X: 0.0 Y: 0.0 Z: 180.0 [Pointer]
2 X: 0.0 Y: 0.0 Z: 0.0 [Eoat2]
Second End-of-Arm Tool. The robot is likely configured to use multiple different tools for different tasks.
10 X: 0.0 Y: 0.0 Z: 0.0 [Eoat10]
Dans I/O SETUP Frame: GET_HOME LINE 0 T2 ABORTED WORLD. Tool Frame Direct Entry 1/7.
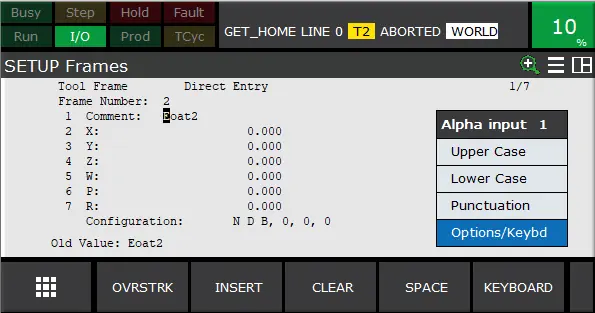
Figure 30 : Alpha input 1
Frame Number: 2
- Cliquez sur Alpha input 1 > Options/Keybd.
1 Comment: Eoat2
Configuration FUT: N D B, 0, 0, 0
F/N, U/D, T/B : configuration logique du robot NOFLIP, DOWN, BACK.
Old Value: Eoat2.
Dans I/O SETUP Frame: GET_HOME LINE 0 T2 ABORTED WORLD. Tool Frame Direct Entry 2/7.
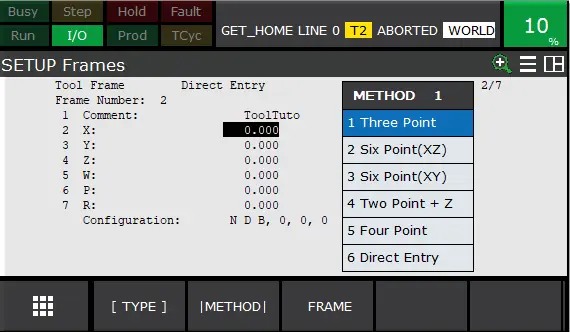
Figure 31 : Tool Three Point
- Cliquez sur METHOD 1 > 1 Three Point.
Tool Frame
Frame Number: 2
1 Comment: ToolTuto
2 X: 0.000
La méthode des trois points (Three Point method) est une technique utilisée pour définir la position et l'orientation d'un Tool Frame dans l'espace en déplaçant le TCP en X, Y et Z, les paramètres d'orientation W, P, R restant à zéro :
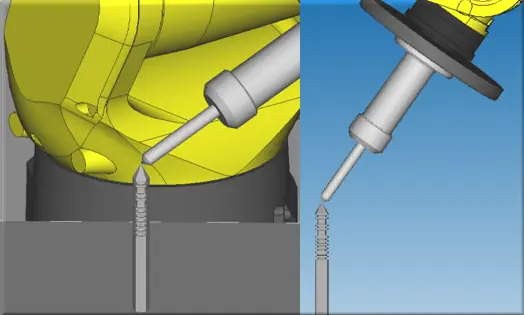
Figure 32 : Calibration droite 3 points
- Identifiez trois points non colinéaires (c'est-à-dire qu'ils ne peuvent pas être alignés sur une même ligne) sur le Tool Frame ou sur l'objet à définir ;
- Pour chaque point, déterminez ses coordonnées X, Y, et Z dans le système de coordonnées du robot. Ces coordonnées sont généralement mesurées ou déterminées par un système de vision ou un autre capteur ;
- Le robot utilise les coordonnées de ces trois points pour calculer la position et l'orientation du Tool Frame. En d'autres termes, il détermine la transformation (translation et rotation) qui permet de passer du système de coordonnées du robot au système de coordonnées du Tool Frame.
Dans I/O SETUP Frame : JOG -010 Jog pressed before shift.
GET_HOME LINE 0 T2 ABORTED WORLD. Tool Frame. Three Point 2/4.
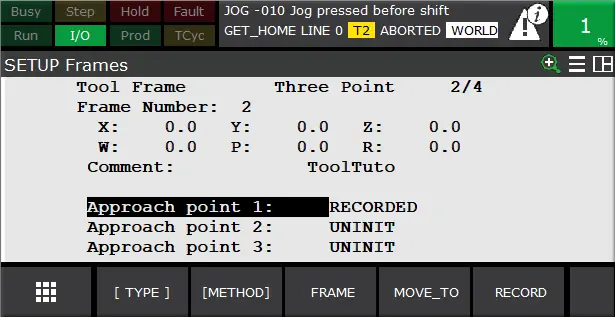
Figure 33 : Approach point 1
- Approach point 1: RECORDED
- Approach point 2: UNINIT
- Approach point 3: UNINIT
Dans I/O SETUP Frame : GET_HOME LINE 0 T2 ABORTED WORLD. Tool Frame. Three Point 4/4.
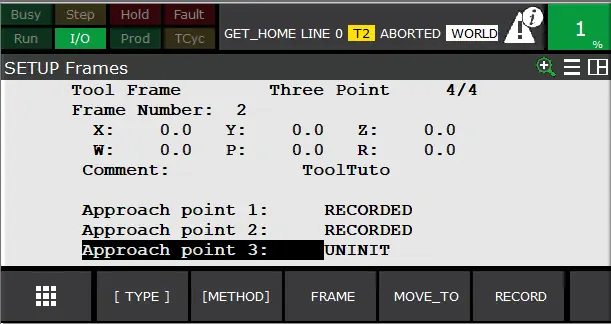
Figure 34 : Approach point 3
- Approach point 1: RECORDED
- Approach point 2: RECORDED
- Approach point 3: UNINIT
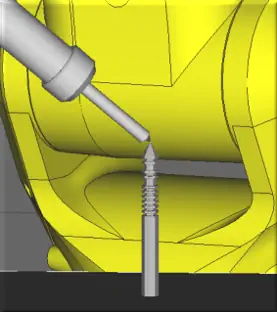
Figure 35 : Calibration gauche 3 points
Dans I/O SETUP Frame : JOG -004 Illegal linear jogging.
GET_HOME LINE 0 T2 ABORTED WORLD. Tool Frame. Three Point 1/4.
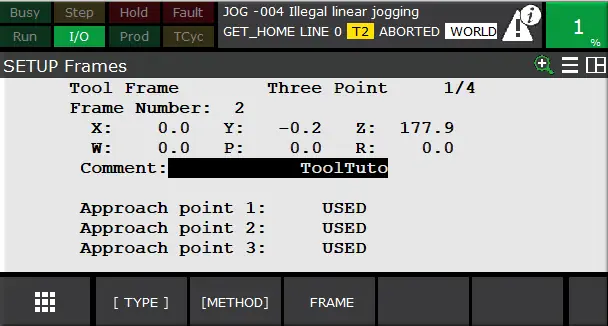
Figure 36 : Approach point 3 USED
Frame Number: 2
X: 0.0 Y: -0.2 Z: 177.9
W: 0.0 P: 0.0 R: 0.0
- Approach point 1: USED
- Approach point 2: USED
- Approach point 3: USED
La méthode des trois points a été testée avec J4 à J6.

Figure 37 : EE Pneumatic Output
La prise EE de l'effecteur terminal (End Effector) permet le contrôle précis de la pince SCHUNK.

Figure 38 : AIR1 RMP Wiring
Le câble RMP permet de centraliser l'alimentation, les signaux et le contrôle du robot FANUC LR Mate 200iD, grâce au contrôleur R-30iB Mate Plus. Le boîtier AIR1 peut assurer la connexion physique entre les composants pneumatiques.