Dans la vue latérale face avant, posture neutre Home de l'axe J1 à 0° de rotation de la base :
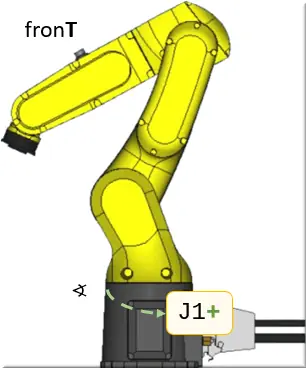
Figure 25 : fronT J1 base
La configuration fronT dans le code FUT oriente généralement la base du robot vers l'avant (J1+ dans la plage positive), permettant d’accéder à une zone de travail étendue face à l'observateur situé à gauche. Cette orientation est souvent privilégiée pour les opérations nécessitant ce positionnement précis, ou pour éviter des obstacles sur le plan horizontal. Un arc vert indique la direction du mouvement de rotation de la base.
Dans la vue latérale arrière, l'axe J1 se trouve dans une posture proche de 180° de rotation de la base :
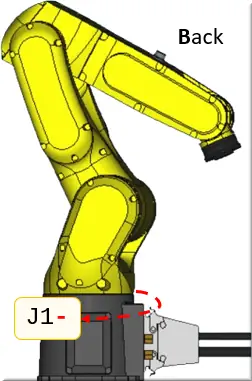
Figure 26 : J1 base Back
La configuration Back dans le code FUT oriente la base du robot vers l'arrière (J1- dans la plage négative), offrant une vue dégagée pour les opérations situées sur le côté câbles pneumatiques AIR1 et électriques RMP. Cette position est employée pour les tâches nécessitant ce positionnement précis, ou pour optimiser l'accès à des zones spécifiques. Un arc rouge indique la direction du mouvement de rotation de la base.