Position articulaire de l’axe J5.
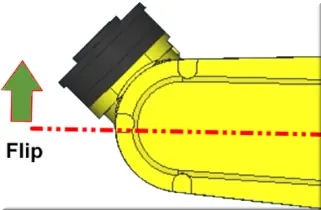
Figure 21 : Wrist in Flip
L'articulation du poignet est orientée en position Flip.
Cette configuration, symbolisée par la lettre "F" dans le code FUT, incline le poignet vers le haut pour une perspective opérationnelle appropriée. La flèche ⇧ indique la direction de rotation par rapport au repère rouge.
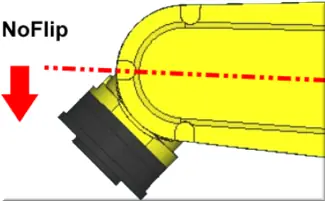
Figure 22 : Wrist in NoFlip
La position du poignet robot en NoFlip est orientée vers le bas.
Cette configuration, représentée par la lettre "N" dans le code FUT, offre une perspective opérationnelle différente. La flèche ⇩ indique la direction de rotation par rapport au repère.