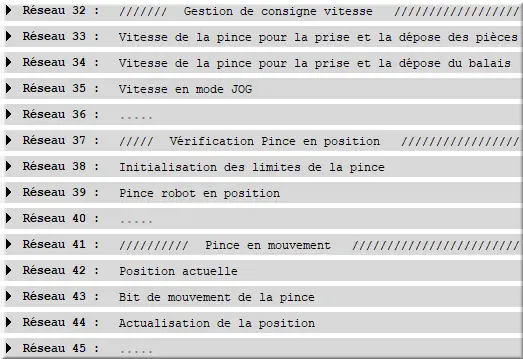
Figure 43 : Net32 vitesse to 45
- Réseau 32 : Gestion de la consigne vitesse
- Réseau 33 : Vitesse de la pince pour la prise et la dépose des pièces
- Réseau 34 : Vitesse de la pince pour la prise et la dépose du balai
- Réseau 35 : Vitesse en mode JOG
- Réseau 36 : ...
- Réseau 37 : Vérification de la position de la Pince
- Réseau 38 : Initialisation des limites de la pince
- Réseau 39 : Pince et robot en position
- Réseau 40 : ...
- Réseau 41 : Détection de mouvement de la pince
- Réseau 42 : Position actuelle de la pince
- Réseau 43 : Bit d’indication de mouvement de la pince
- Réseau 44 : Actualisation de la position de la pince
- Réseau 45 : ...
Réseau 33 : Vitesse de la pince pour la prise et la dépose des pièces.
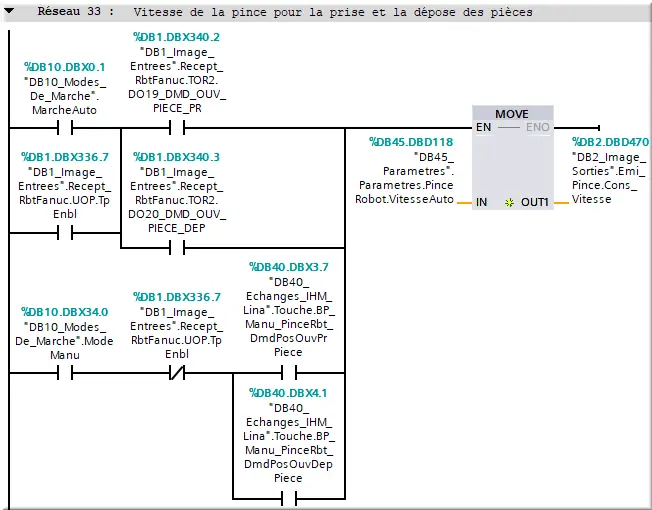
Figure 44 : net33 Vitesse pince
Ce réseau détermine la vitesse de la pince lors des demandes d'ouverture et de fermeture pour la prise et le dépôt des pièces. Cette vitesse peut être ajustée manuellement via les boutons du logiciel Lina d'hypervision.
Réseau 35 : Vitesse en mode JOG.
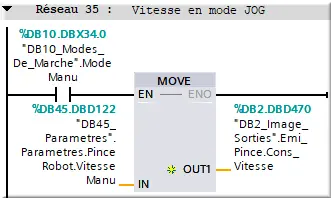
Figure 45 : net35 Vitesse mode JOG
Ce réseau contrôle la vitesse de la pince en mode JOG, offrant un contrôle manuel de la vitesse pendant les ajustements.
Réseau 38 : Initialisation des limites de la pince.
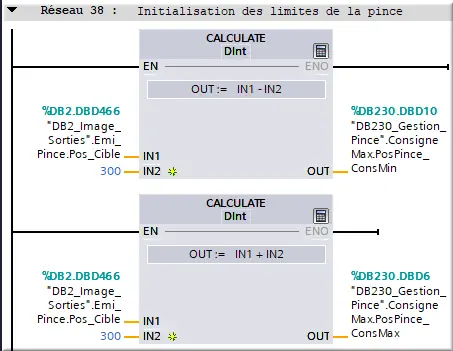
Figure 46 : net38 init limite pince
Ce réseau établit les limites de la course de la pince. Il définit les positions minimale et maximale autorisées, empêchant ainsi la pince de dépasser ses limites physiques.
Réseau 39 : Pince robot en position.
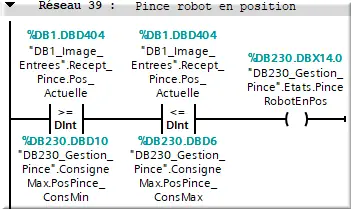
Figure 47 : net39 Pince robot pos
Ce réseau vérifie que la position de la pince est conforme aux limites définies et que le robot est en position, assurant ainsi une opération sûre et précise.
Réseau 42 : Position actuelle
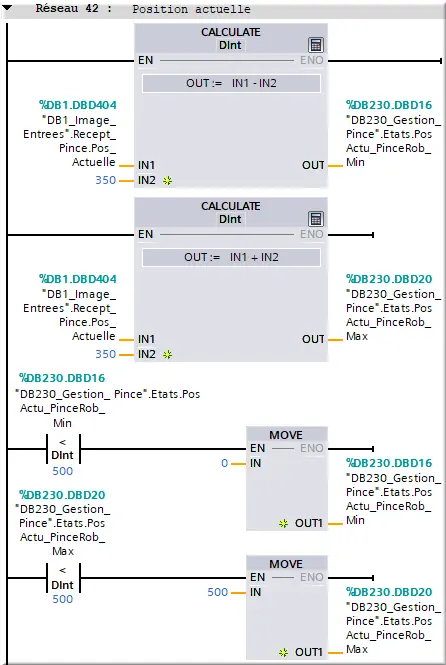
Figure 48 : net42 Position actuelle
Ce réseau calcule la position actuelle de la pince, en tenant compte des limites minimale et maximale établies, pour obtenir une valeur de position filtrée et réaliste. Il fournit ainsi une valeur de position 'sûre', susceptible de corriger les lectures incorrectes ou extrêmes.
Réseau 43 : Bit de mouvement de la pince.
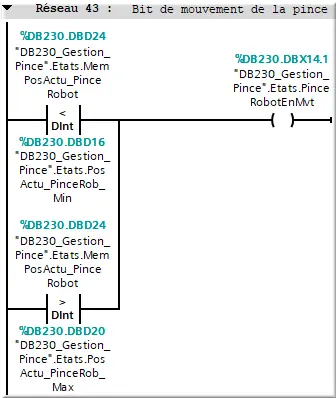
Figure 49 : net43 Bit move
Ce réseau sert d'indicateur pour déterminer si la pince est actuellement en mouvement. Il fournit un signal clair sur l’état de mouvement de la pince.
Réseau 44 : Actualisation de la position.
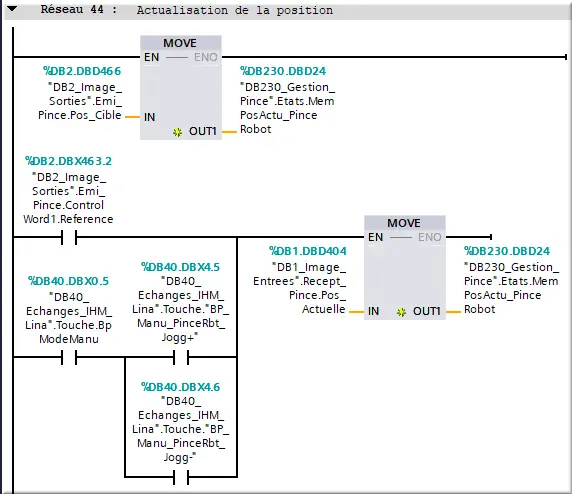
Figure 50 : net44 Actualisation position
Ce réseau permet de sauvegarder la position actuelle de la pince dans une variable, rendant cette information disponible pour d'autres processus ou affichages.