3.1 Réseau 1 à 14
Programme de la gestion de la pince :
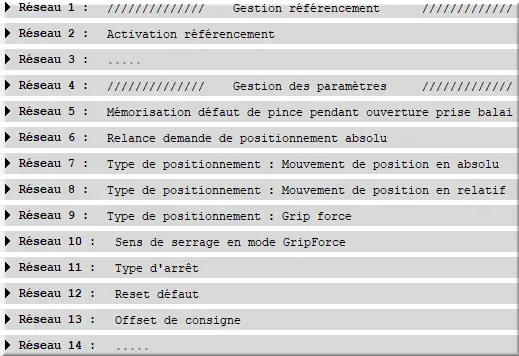
Figure 24 : Net1 ref to 14
- Réseau 1 : Gestion du référencement
- Réseau 2 : Activation du référencement
- Réseau 3 : ...
- Réseau 4 : Gestion des paramètres
- Réseau 5 : Mémorisation des défauts de la pince pendant l'ouverture et la prise du balai
- Réseau 6 : Relance de la demande de positionnement absolu
- Réseau 7 : Type de positionnement : Mouvement de position en absolu
- Réseau 8 : Type de positionnement : Mouvement de position en relatif
- Réseau 9 : Type de positionnement : Grip force (serrage par force)
- Réseau 10 : Sens de serrage en mode GripForce
- Réseau 11 : Type d'arrêt (mode de freinage)
- Réseau 12 : Reset des défauts
- Réseau 13 : Offset de consigne
- Réseau 14 : ...
Réseau 2 : L’Activation du référencement permet à la pince de retrouver son point zéro et de recalculer ses positions avec précision :
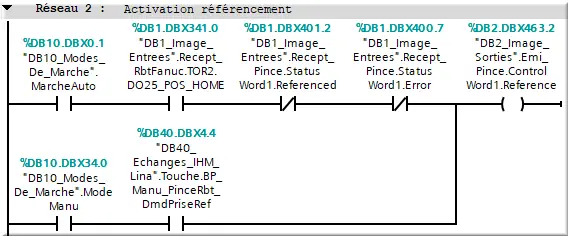
Figure 25 : net2 Activation référencement
Ce réseau est activé lorsque la machine est en marche, le robot est en position home, et la pince n'est pas référencée. En mode manuel, l’appui sur un bouton permet de lancer le référencement.
Réseau 5 : Mémorisation défaut de pince pendant fermeture prise balai.
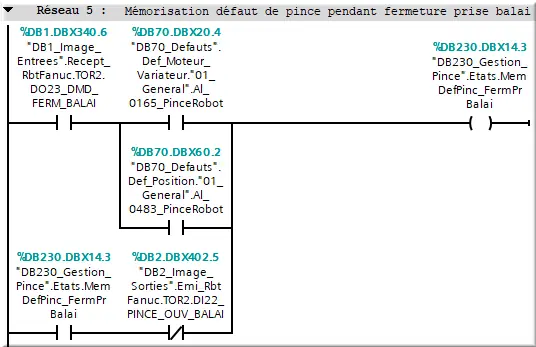
Figure 26 : net5 Mémorisation défaut de pince
Ce réseau mémorise les défauts qui surviennent lors de la fermeture de la pince et de la prise du balai, notamment lorsque les mors ne s'emboîtent pas correctement. Cette mémorisation facilite le diagnostic des problèmes.
Réseau 6 : Relance demande de positionnement absolu.
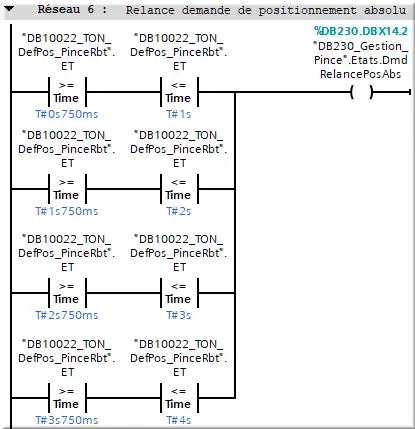
Figure 27 : net6 Relance dmd pos abs
Ce réseau permet de relancer une demande de positionnement absolu de la pince. Son existence est due au besoin d'éviter que la pince ne se bloque en attendant une condition spécifique (front montant), permettant ainsi de relancer un cycle. La relance est déclenchée par la temporisation du défaut 0483.
Réseau 6 : Alarme 0483 : Défaut mise en position trop longue de la pince du robot.
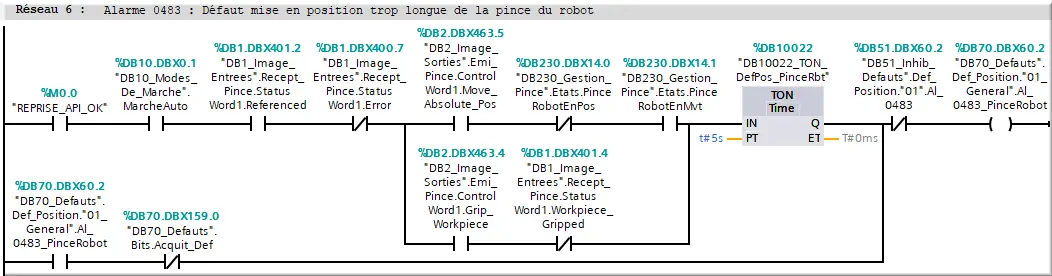
Figure 28 : net6 alarm483 Défaut pos
Ce défaut (0483) permet de gérer les problèmes de positionnement de la pince lorsque le temps nécessaire pour atteindre la position est trop long.
Réseau 7 : Type de positionnement : Mouvement de position en absolu.
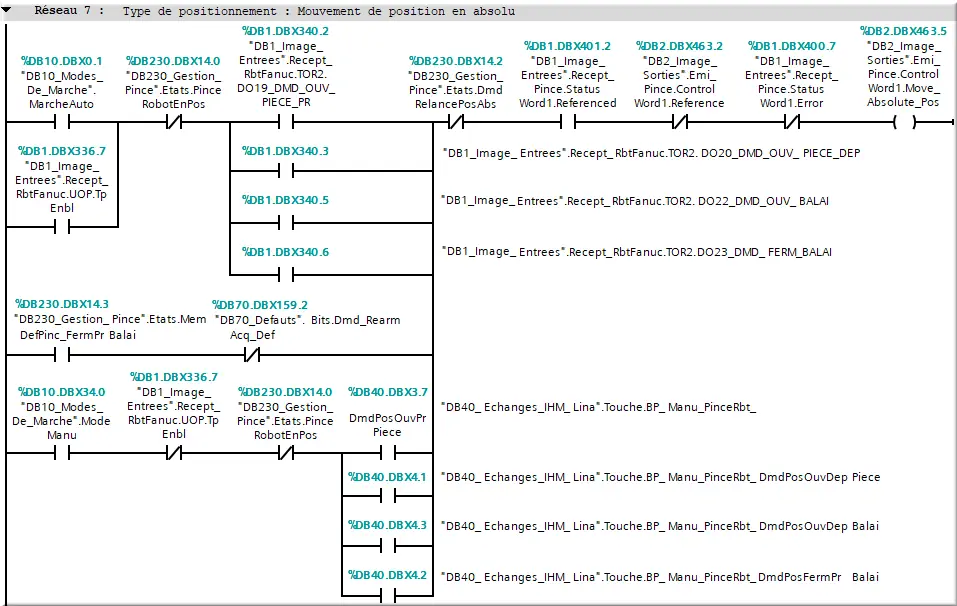
Figure 29 : net7 type pos abs
Le positionnement absolu de la pince permet de se déplacer vers une position définie avec précision (en millimètres) par rapport à la course totale de la pince. Il est particulièrement utile pour les prises répétitives où un contrôle précis de l'ouverture est nécessaire.
Réseau 8 : Type de positionnement : Mouvement de position en relatif.

Figure 30 : net8 pos relatif
Pour des raisons de programmation (positionnement absolu), le positionnement relatif est désactivé dans le programme.
Réseau 9 : Type de positionnement : Grip force.
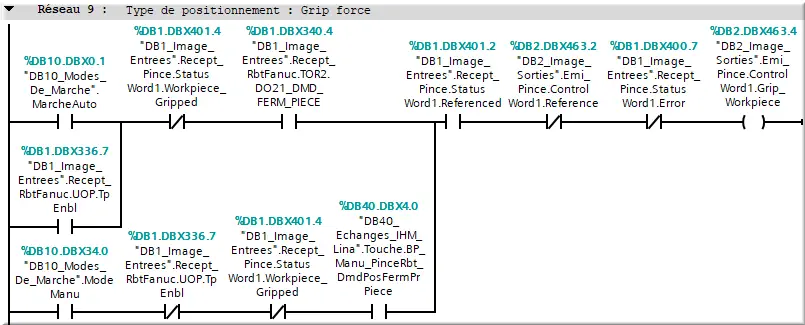
Figure 31 : net9 Grip force
Le mode "Grip force" est utilisé pour la prise de pièces. Lors des tests, il a été constaté que l'utilisation de ce mode améliorait la prise et le dépôt des pièces sur le plateau, en évitant des problèmes liés à des tolérances strictes.
Réseau 10 : Sens de serrage en mode GripForce.
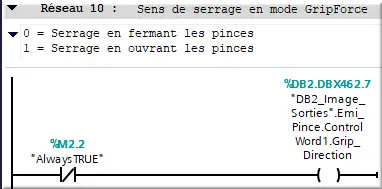
Figure 32 : net10 Sens serrage
Le Sens de serrage est important. Il détermine si l'on souhaite ouvrir (1) ou fermer (0) la pièce par application de force.
Réseau 11 : Type d’arrêt.
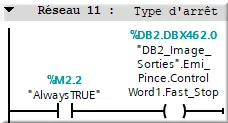
Figure 33 : net11 Type d’arrêt
Il est impératif que le freinage rapide (fast stop) soit activé, sinon la pince ne démarre pas.
Réseau 12 : Reset défaut.
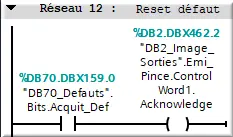
Figure 34 : net12 Reset défaut
Ce réseau permet d’acquitter un état de défaut de la pince.
Réseau 13 : Offset de consigne.
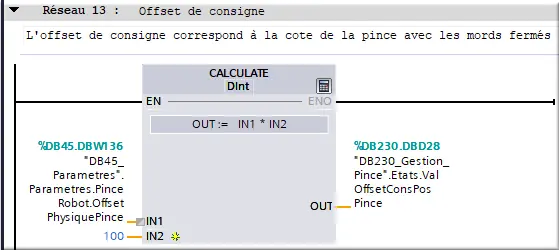
Figure 35 : net13 Offset de consigne
Représentation de l’offset sur la pince :
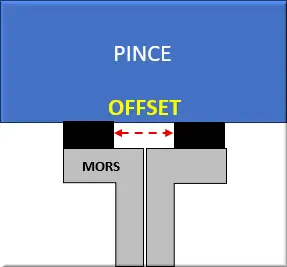
Figure 36 : pince offset mors
L’offset de consigne représente l’écartement entre les mors de la pince au moment où ils se touchent. C'est une valeur de réglage permettant d'ajuster la position de serrage.