Bloc fonction de gestion vérin :
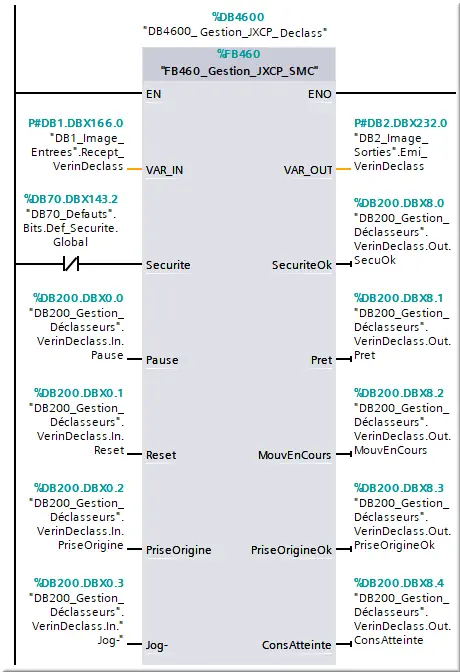
Figure 20 : DB4600 Recept VerinDecls
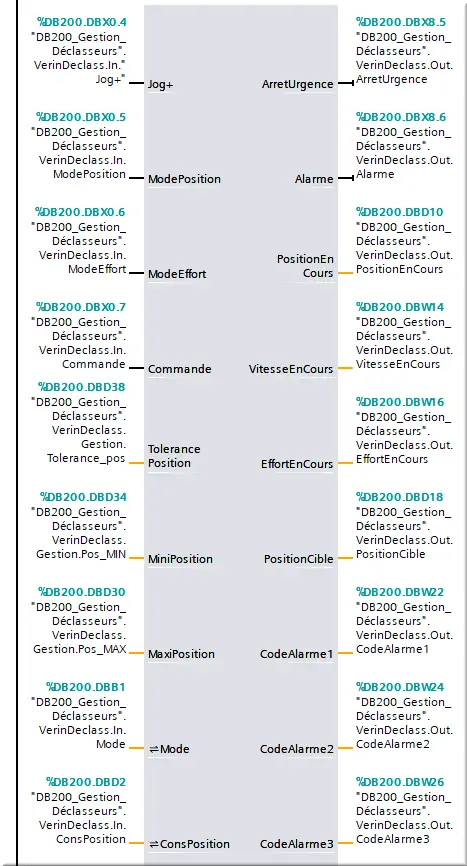
Figure 21 : DB4600 VerinDeclass Jog
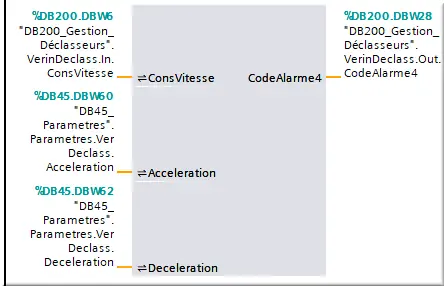
Figure 22 : DB4600 VerinDecls Speed
Le DB4600_JXCP_Declass est un bloc fonction (FB) gérant la logique de commande et de sécurité du vérin vertical, dans un contexte d'insertion/prise de pièces. Il utilise un DB45 pour les paramètres spécifiques et un DB200 pour stocker les états et paramètres.
Ce bloc est le cœur du contrôle du vérin, intégrant sécurité, gestion de modes, et suivi de position pour assurer des opérations précises et sécurisées.
- Le DB45 gère les paramètres de performance.
- Le DB200 contient les états et les flags liés aux différents modes de fonctionnement et à la sécurité.
Le DB4600_JXCP_Declass est conçu pour un contrôle précis et sécurisé du processus de reconnaissance de la pièce par la caméra après son acheminement. Il gère le positionnement précis de la pièce (4 mm pour la position insertion pièce et 28 mm pour la position lecture) et la vitesse pour assurer une reconnaissance fiable.
3.2.1 Declass entrées
- VAR_IN : Entrée réseau du vérin correspondant.
- Sécurité : La sécurité machine doit être raccordée à cette entrée. Elle bloque automatiquement la sortie du bloc.
- Pause : Met le vérin correspondant en pause.
- Reset : Acquitte le défaut du bloc en cours.
- PriseOrigine : Lance une prise d’origine du vérin correspondant.
- Jog – : Déplacement manuel du vérin en direction négative.
- Jog + : Déplacement manuel du vérin en direction positive.
- ModePosition : Sélection du mode position, permettant un déplacement vers des valeurs prédéfinies.
- ModeEffort : Sélection du mode effort, permettant de pousser jusqu’à une force définie.
- Commande : Démarre le bloc en mode automatique.
- TolérancePosition : Tolérance entre la consigne et le retour de position (échelle 0,01).
- MiniPosition : Position minimale autorisée du vérin.
- MaxiPosition : Position maximale autorisée du vérin.
3.2.2 Declass sorties
- VAR_OUT : Sortie réseau du vérin correspondant.
- SécuritéOK : La sécurité du bloc est active.
- Prêt : Le vérin est prêt à l’utilisation.
- MouvEnCours : Le vérin est en mouvement.
- PriseOrigineOK : La prise d’origine s’est correctement déroulée.
- ConsAtteinte : La consigne est atteinte.
- ArretUrgence : Un arrêt d’urgence est actif.
- Alarme : Une ou plusieurs alarmes sont en cours.
- PositionEnCours : Position actuelle du vérin.
- VitesseEnCours : Vitesse actuelle du vérin.
- EffortEnCours : Effort actuel du vérin.
- PositionCible : Le vérin est en position cible.
- CodeAlarme1 : Code de l’alarme la plus récente.
- CodeAlarme2 : Code de l’alarme suivante.
- CodeAlarme3 : Code de l’alarme suivante.
- CodeAlarme4 : Code de l’alarme la plus ancienne.
3.2.3 Declass E/S
- Mode : Sélection du mode de déplacement (1 = absolu / 2 = relatif).
- ConsPosition : Consigne de position (échelle 0,01).
- ConsVitesse : Consigne de vitesse, de 0 à 400 mm/s.
- Acceleration : Consigne d’accélération, de 0 à 3000 mm/s².
- Deceleration : Consigne de décélération, de 0 à 3000 mm/s².